

目录
快速导航-
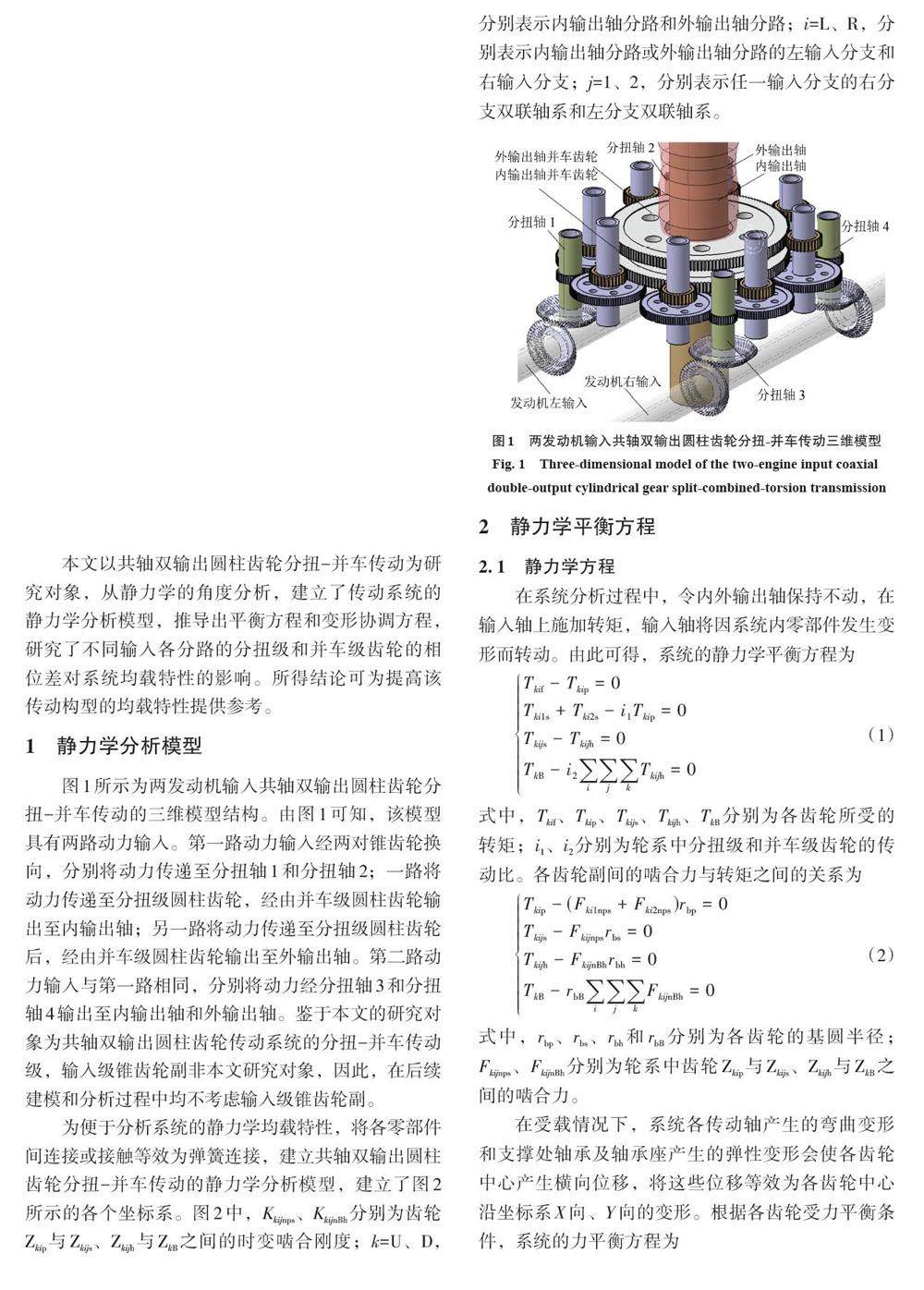
理论研究 | 啮合相位差对共轴双输出圆柱齿轮分扭-并车传动静态均载特性的影响
理论研究 | 啮合相位差对共轴双输出圆柱齿轮分扭-并车传动静态均载特性的影响
-
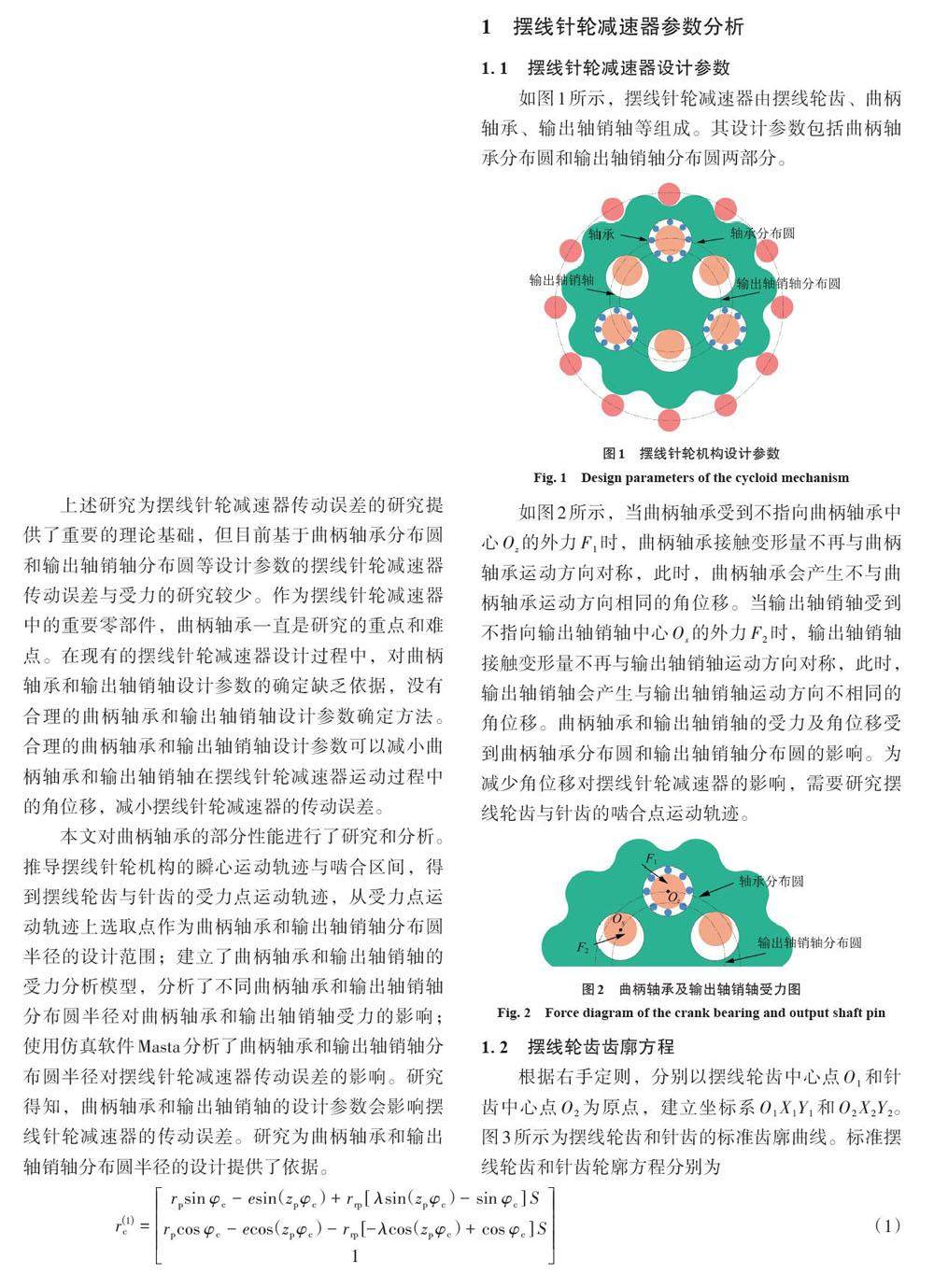
理论研究 | 考虑曲柄轴承及输出轴销轴的摆线针轮减速器传动误差分析
理论研究 | 考虑曲柄轴承及输出轴销轴的摆线针轮减速器传动误差分析
-
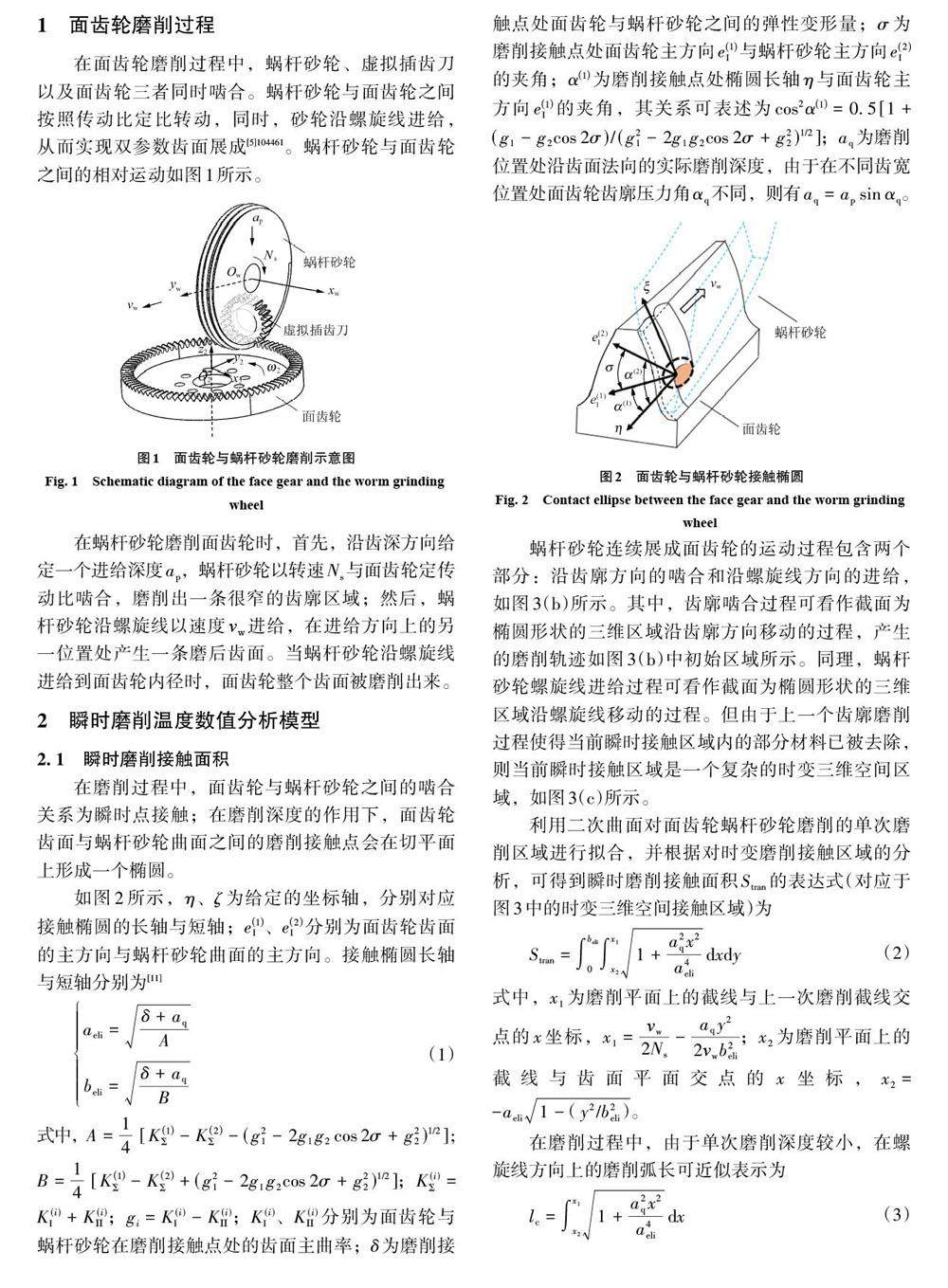
理论研究 | 面齿轮蜗杆砂轮瞬时磨削温度数值分析模型
理论研究 | 面齿轮蜗杆砂轮瞬时磨削温度数值分析模型
-
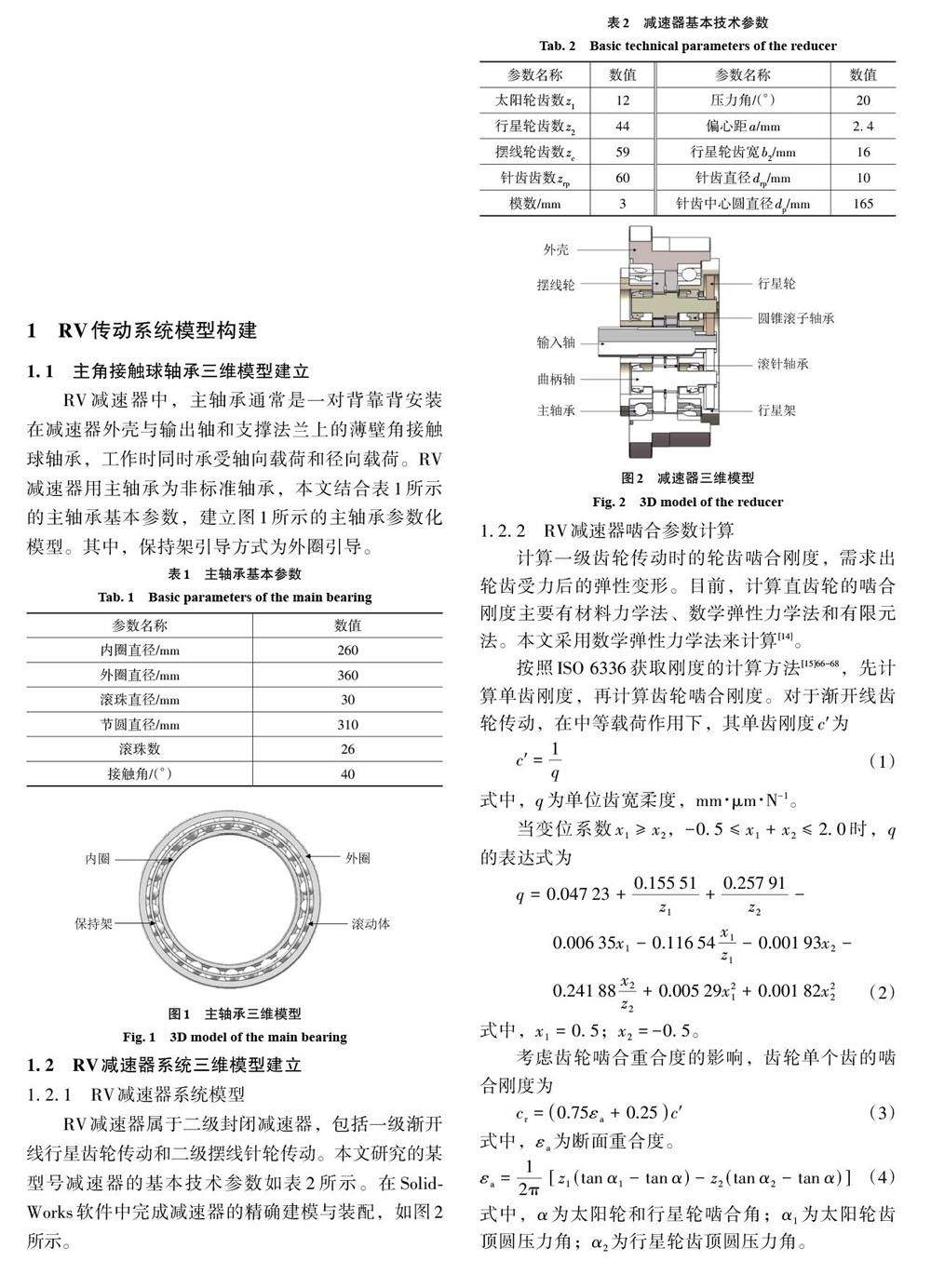
理论研究 | 主轴承柔性及润滑特性对RV减速器传动误差影响分析
理论研究 | 主轴承柔性及润滑特性对RV减速器传动误差影响分析
-
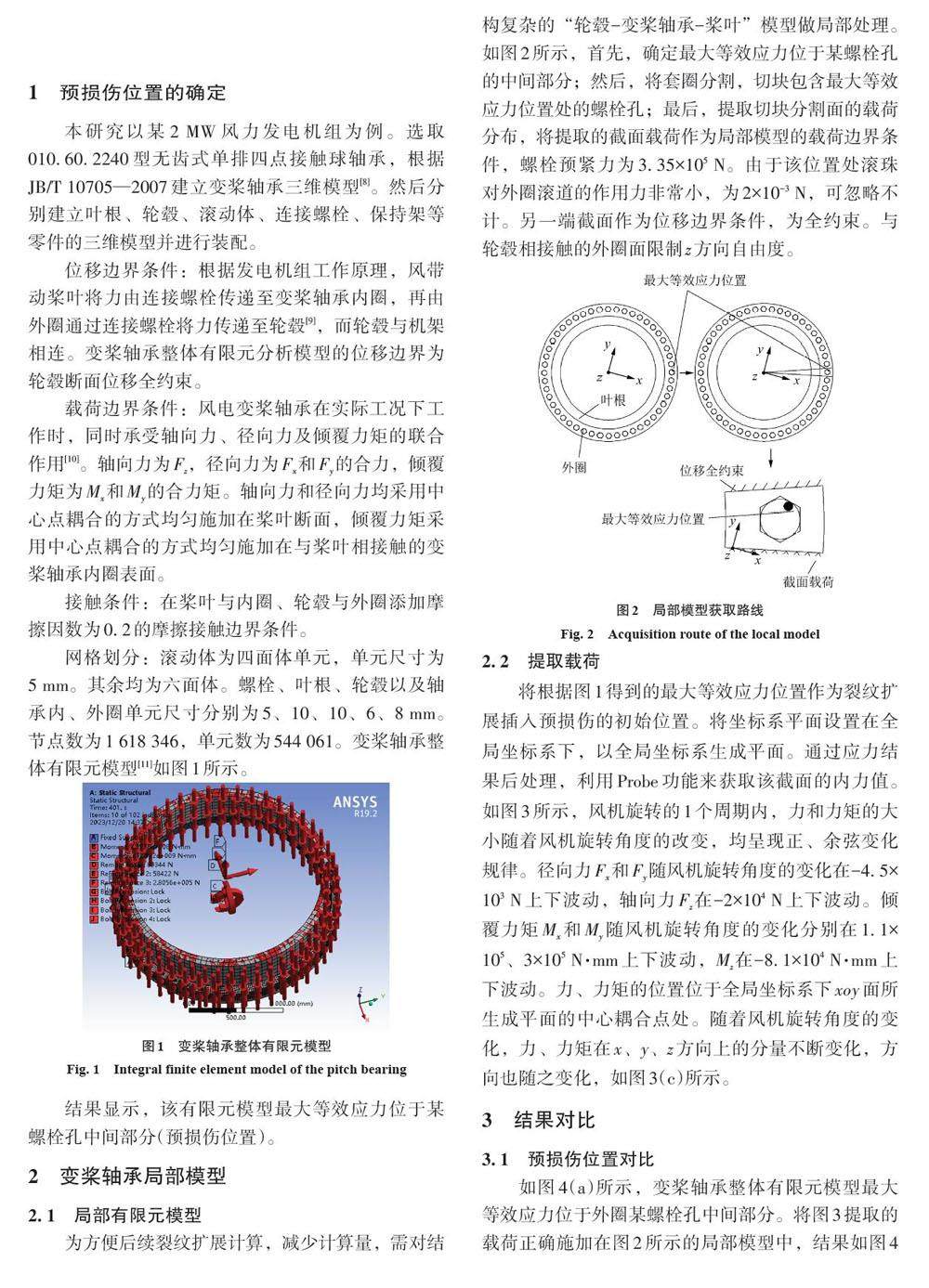
理论研究 | 变桨轴承套圈预损伤后的结构疲劳剩余寿命研究
理论研究 | 变桨轴承套圈预损伤后的结构疲劳剩余寿命研究
-
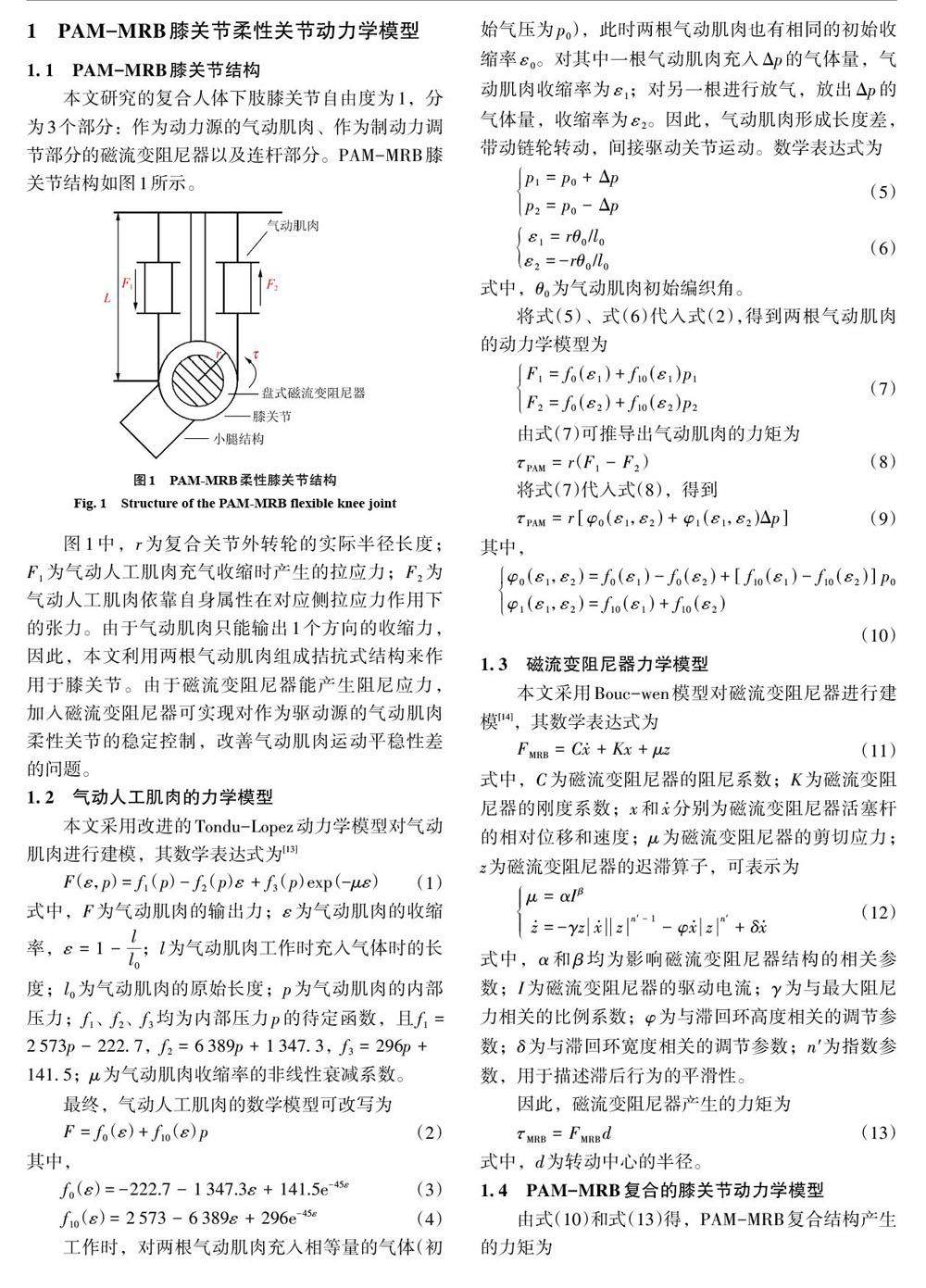
设计计算 | 基于MFAC-ILC的PAM-MRB柔性膝关节的仿真与试验研究
设计计算 | 基于MFAC-ILC的PAM-MRB柔性膝关节的仿真与试验研究
-
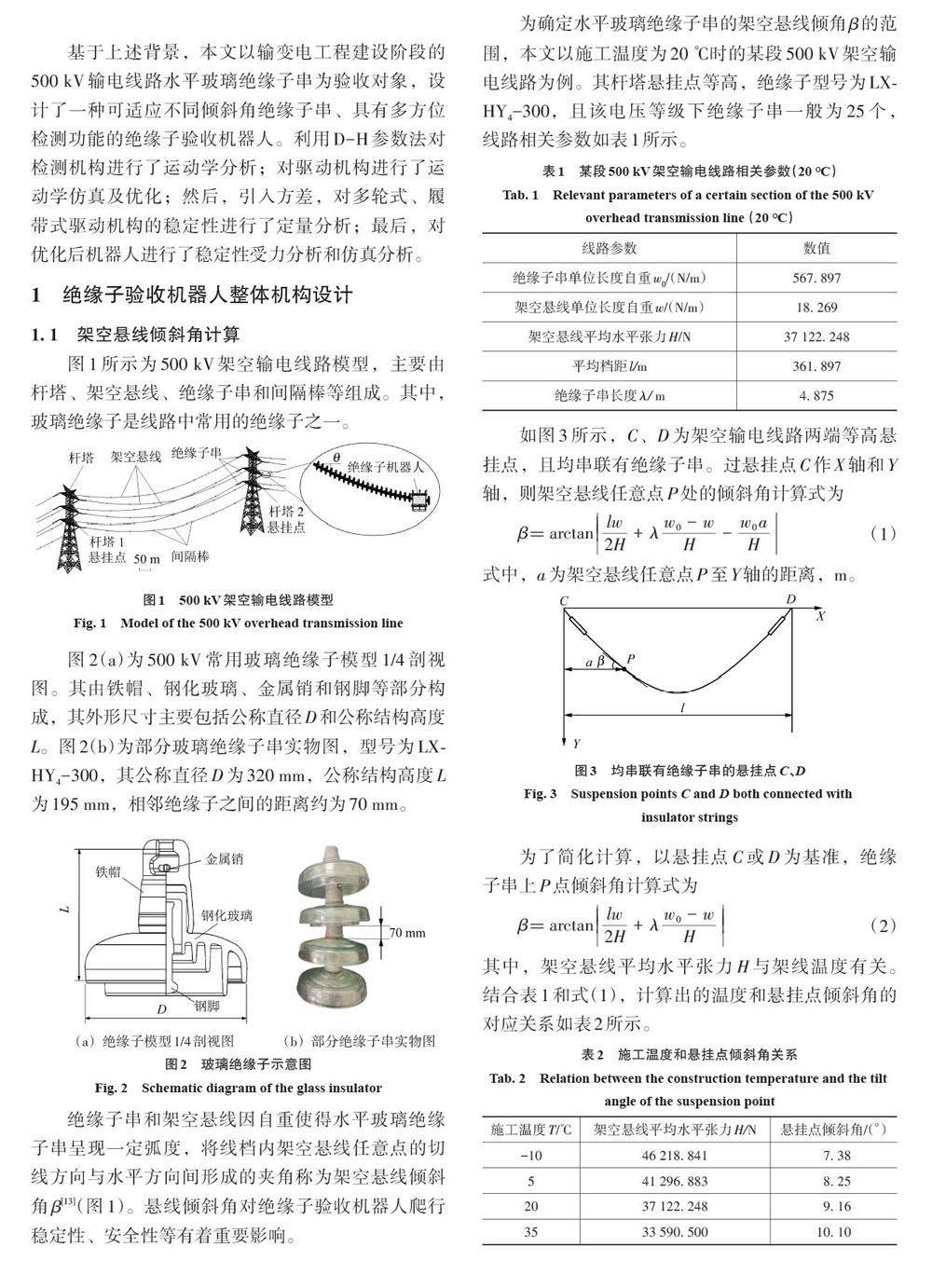
设计计算 | 500 kV输电线路绝缘子安装质量验收机器人机构设计
设计计算 | 500 kV输电线路绝缘子安装质量验收机器人机构设计
-
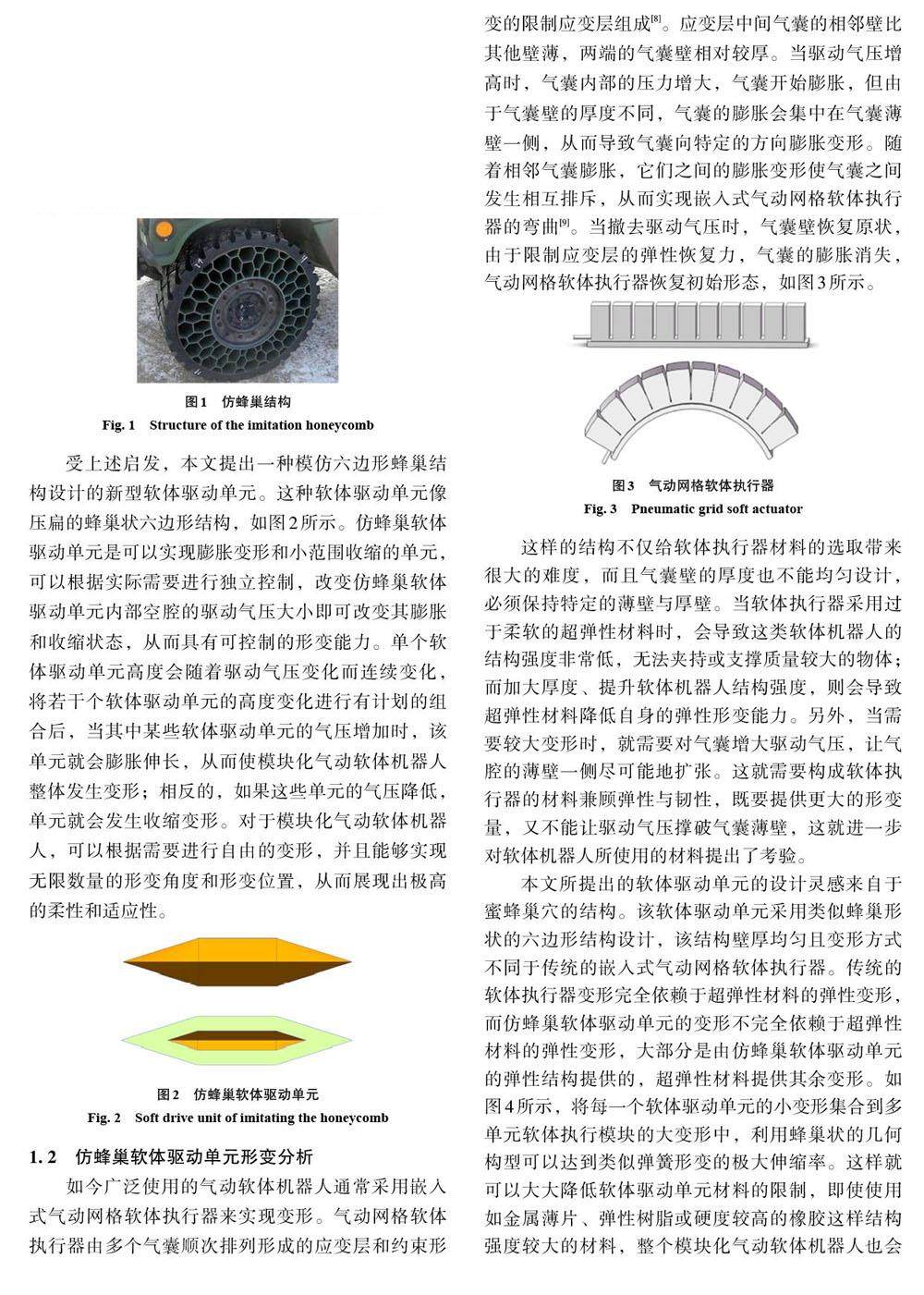
设计计算 | 模块化气动软体爬行机器人的设计与分析
设计计算 | 模块化气动软体爬行机器人的设计与分析
-
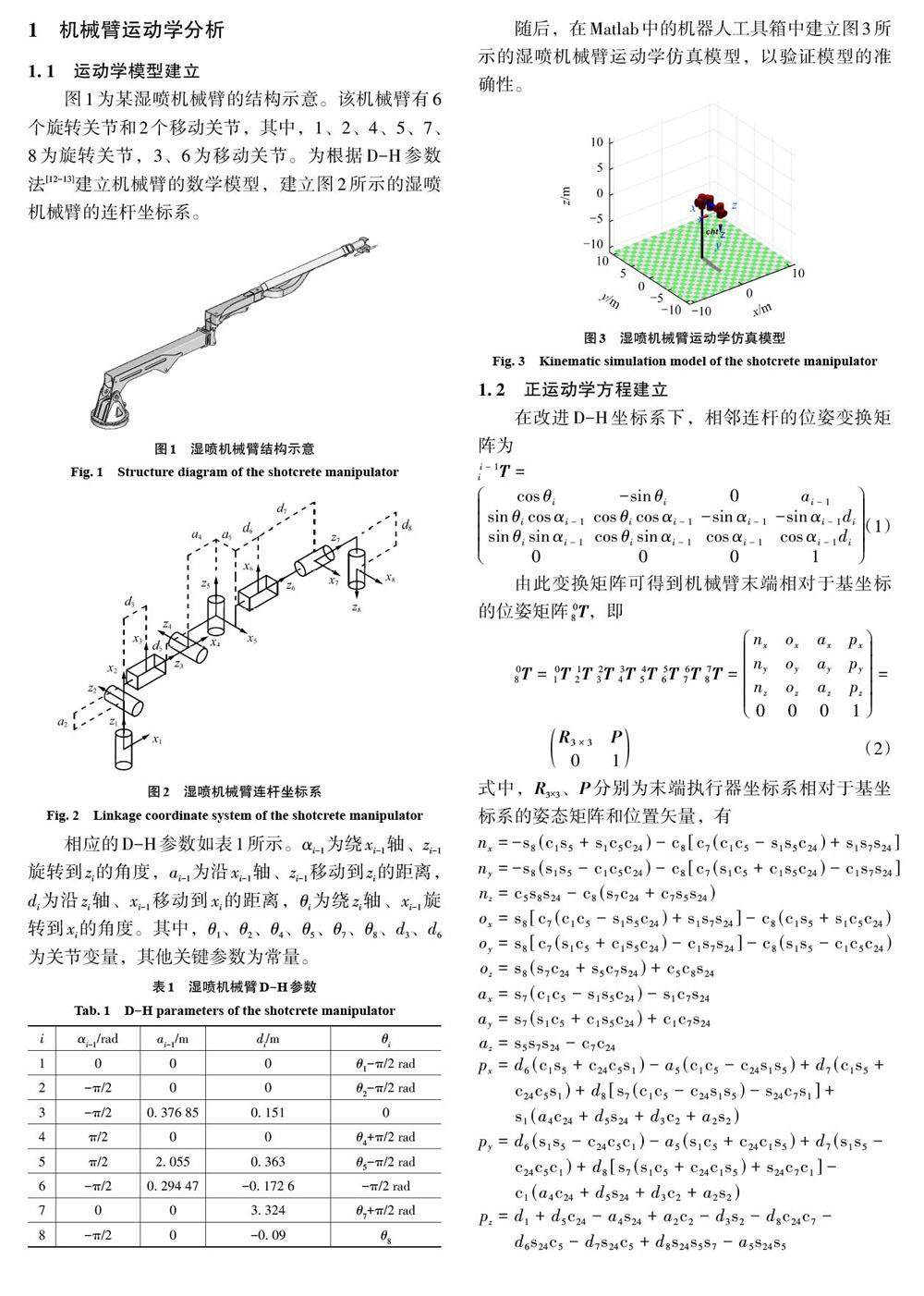
设计计算 | 基于改进蜂群算法的湿喷机械臂逆解研究
设计计算 | 基于改进蜂群算法的湿喷机械臂逆解研究
-
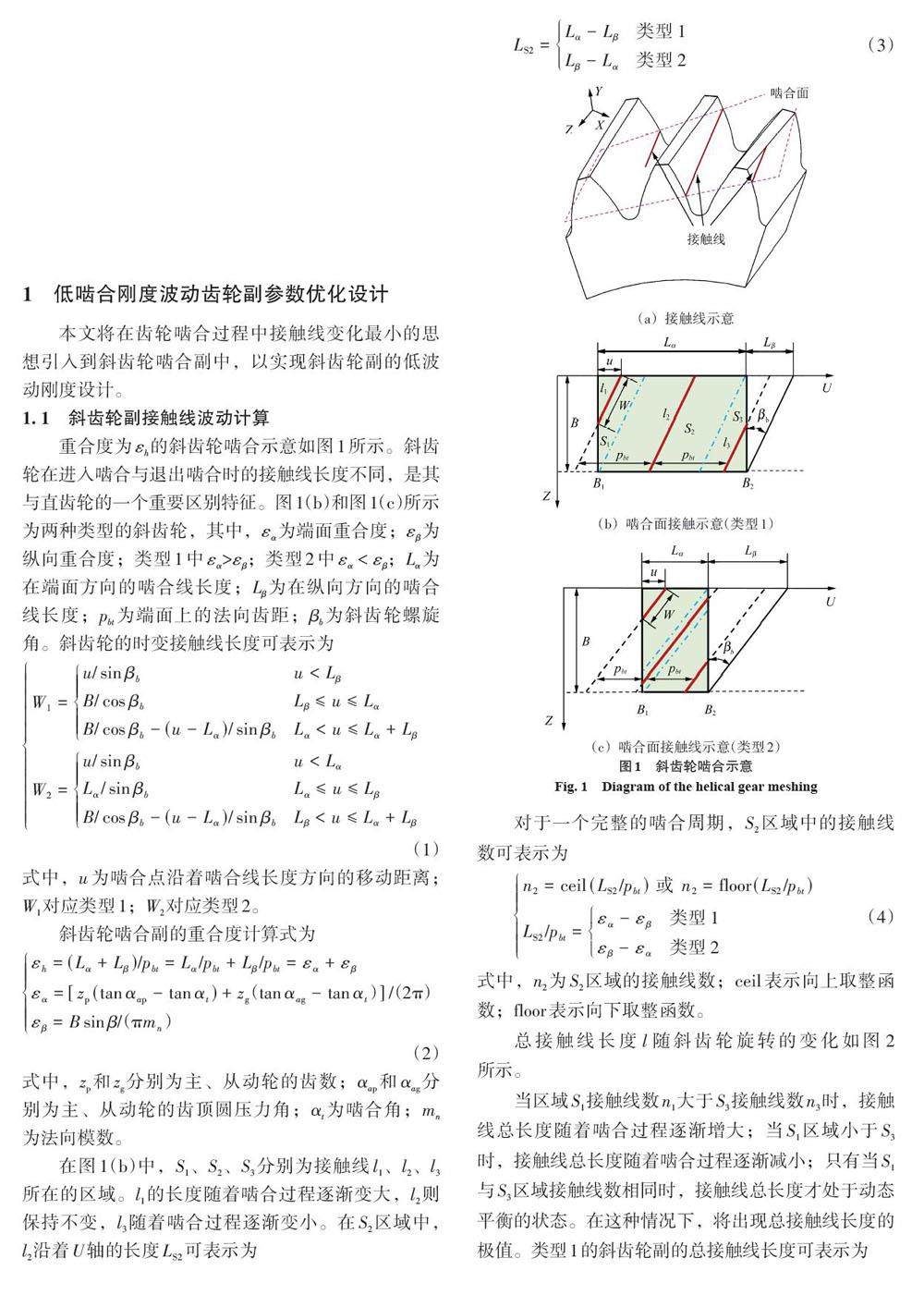
设计计算 | 改善斜齿轮系统振动的低波动啮合刚度设计
设计计算 | 改善斜齿轮系统振动的低波动啮合刚度设计
-
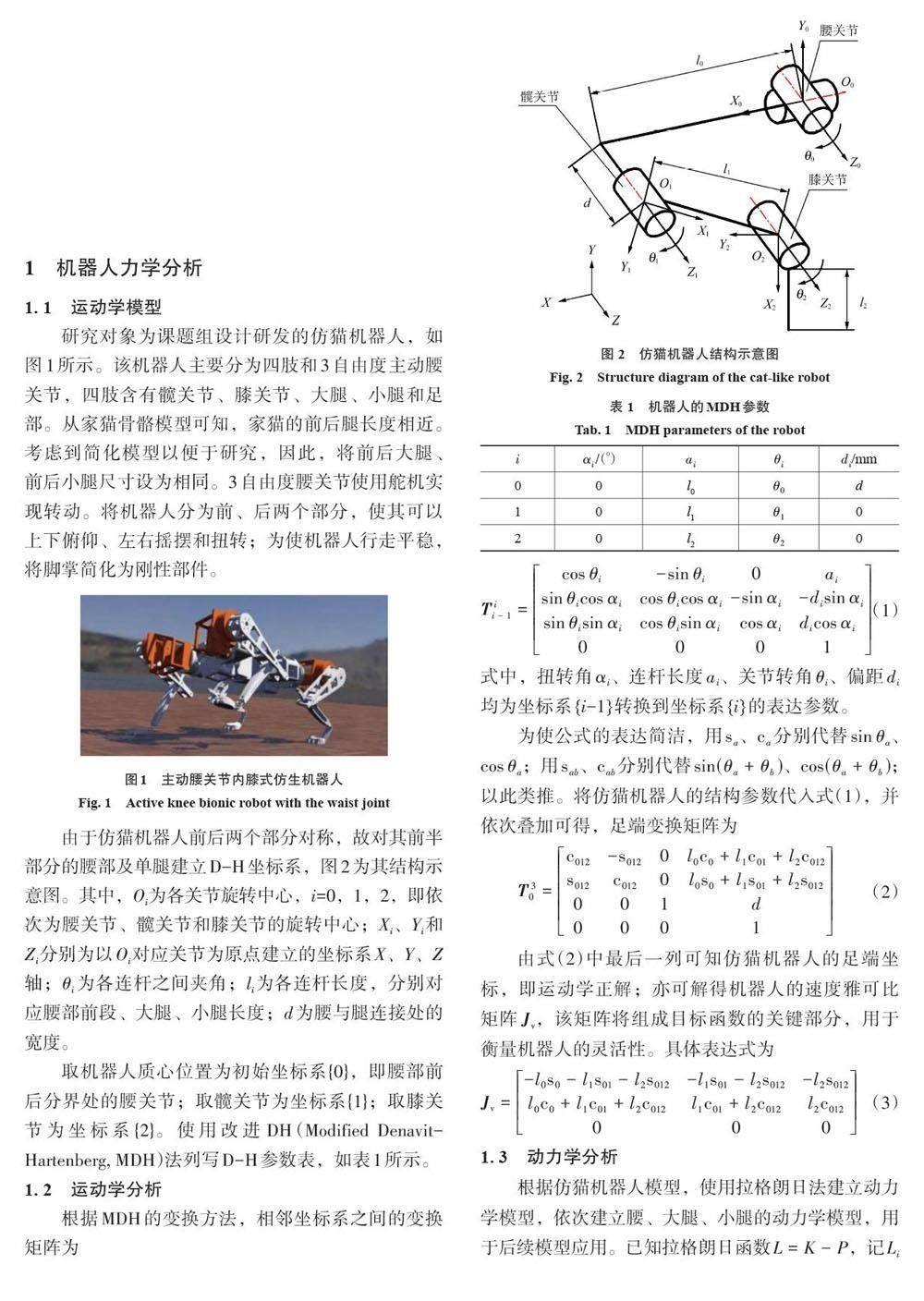
设计计算 | 多约束仿猫机器人尺寸综合优化
设计计算 | 多约束仿猫机器人尺寸综合优化
-
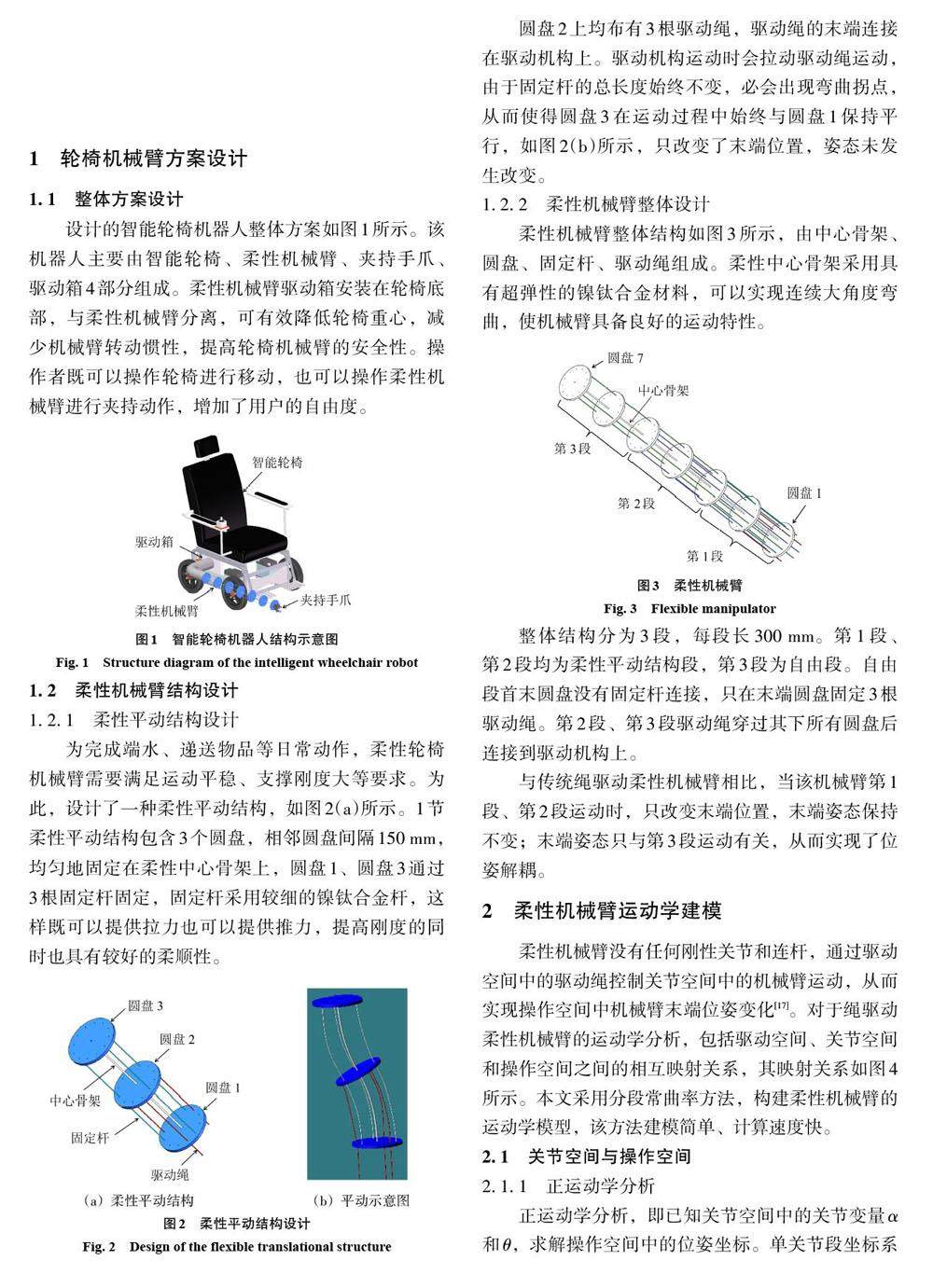
设计计算 | 绳驱柔性轮椅机械臂解耦设计与运动学分析
设计计算 | 绳驱柔性轮椅机械臂解耦设计与运动学分析
-
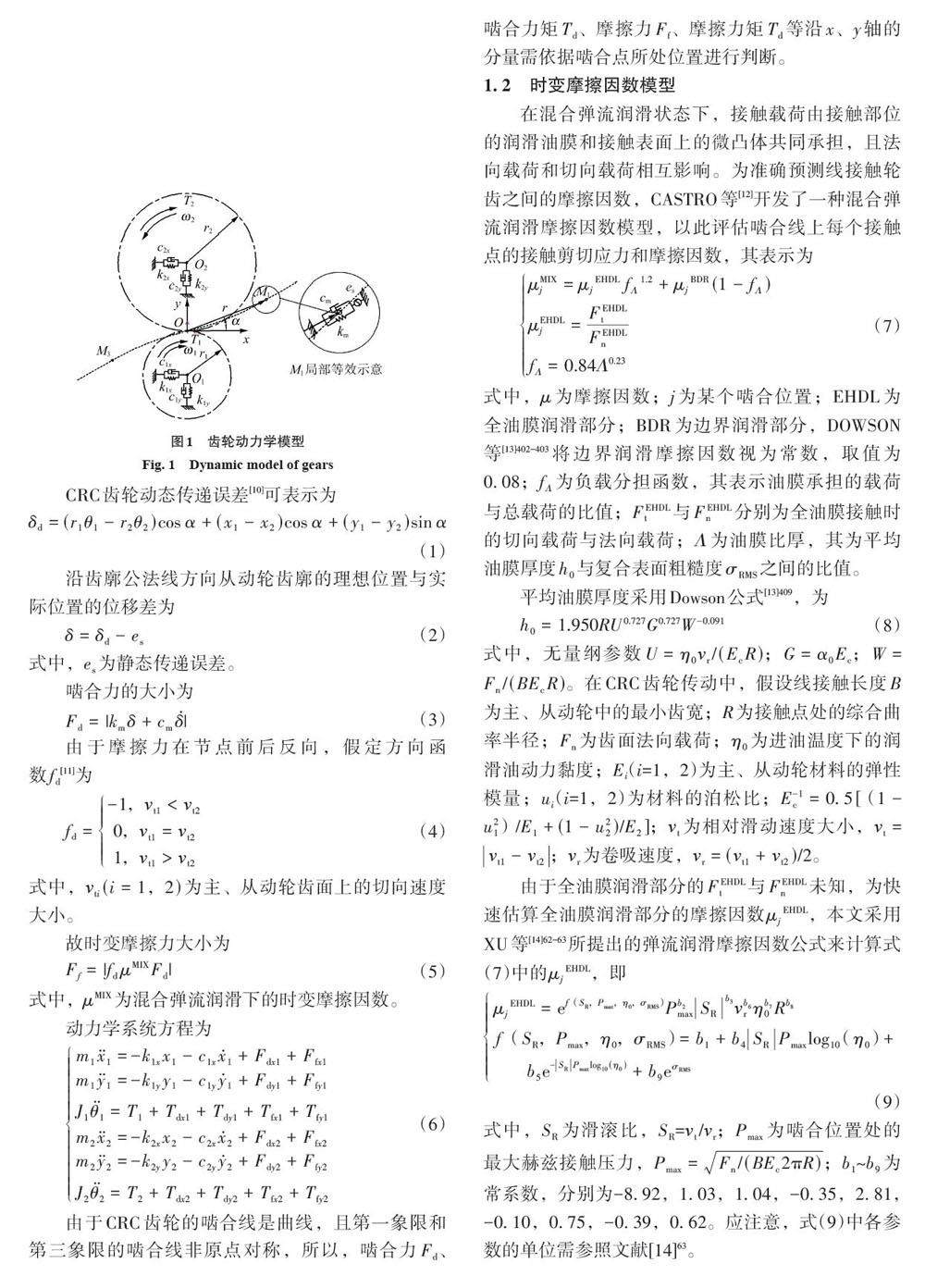
试验分析 | 混合弹流润滑下等相对曲率齿轮黏着磨损分析
试验分析 | 混合弹流润滑下等相对曲率齿轮黏着磨损分析
-

试验分析 | 载荷与温度对20CrMnTi合金钢磨蚀行为的影响
试验分析 | 载荷与温度对20CrMnTi合金钢磨蚀行为的影响
-
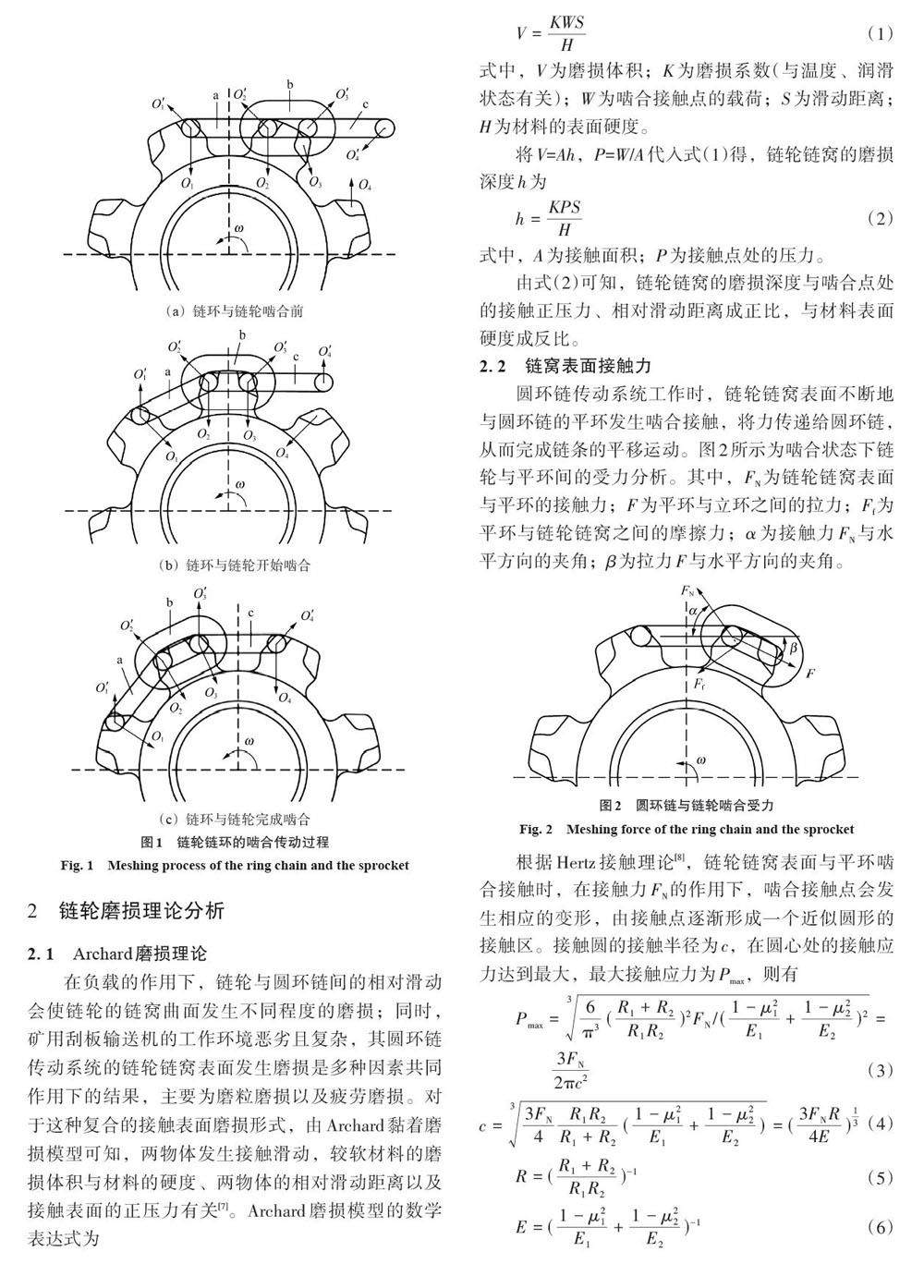
试验分析 | 矿用刮板输送机链轮更换修复评价方法
试验分析 | 矿用刮板输送机链轮更换修复评价方法
-

试验分析 | 油润滑和干摩擦条件下微织构对齿轮啮合噪声的影响
试验分析 | 油润滑和干摩擦条件下微织构对齿轮啮合噪声的影响
-
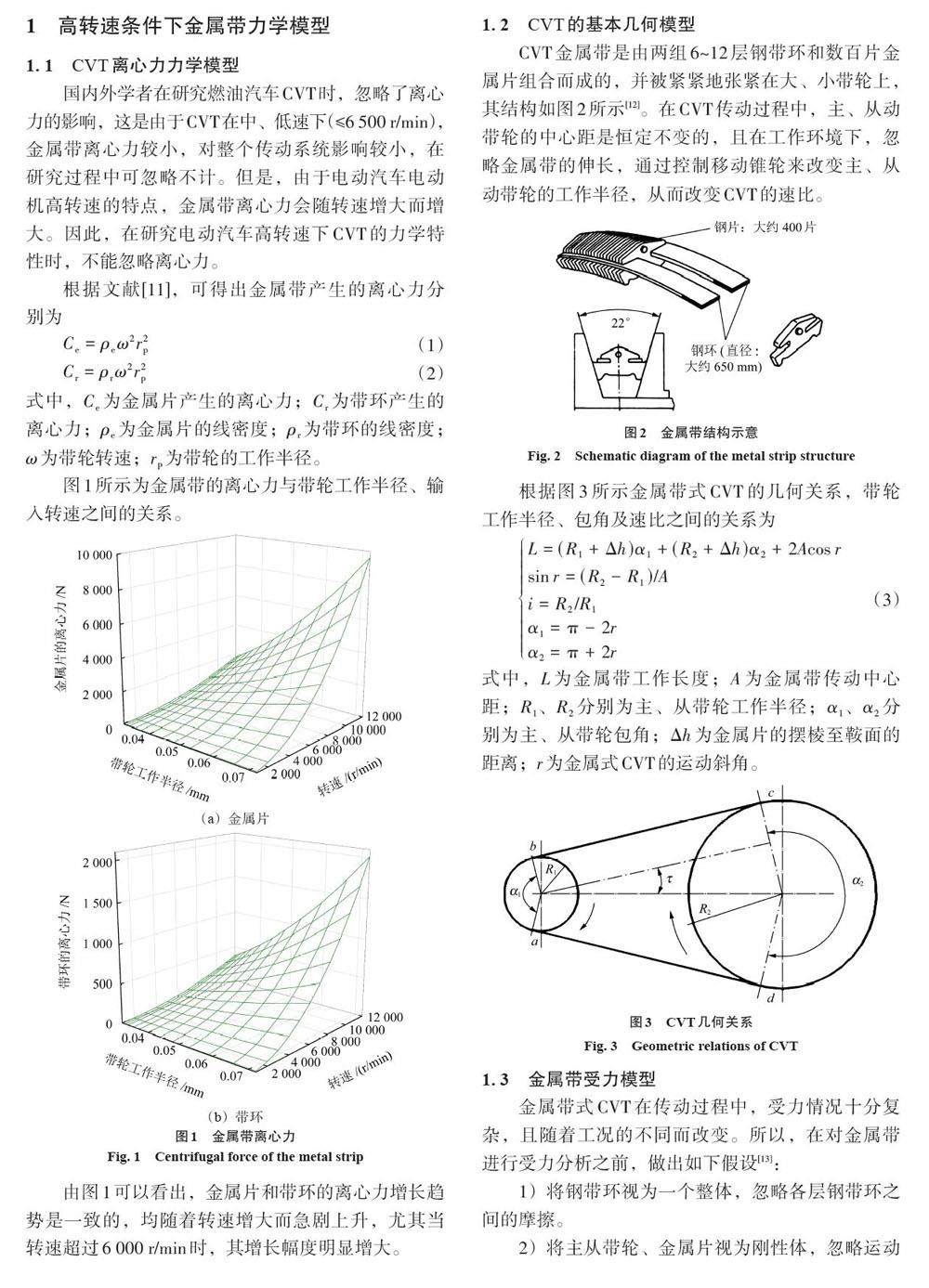
试验分析 | 高转速条件下CVT金属片强度及磨损分析
试验分析 | 高转速条件下CVT金属片强度及磨损分析
-
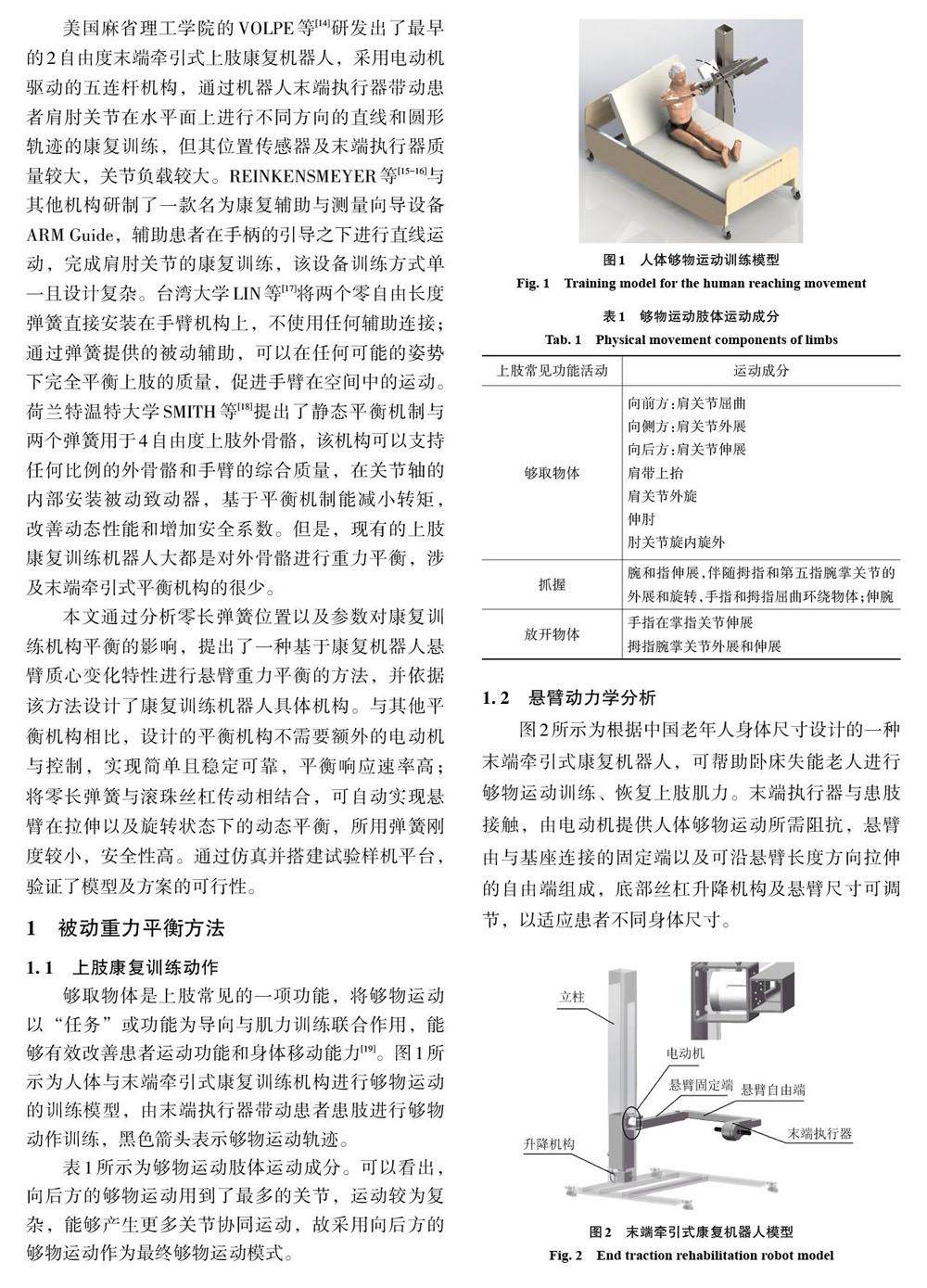
开发应用 | 重力自平衡上肢康复机器人设计与试验
开发应用 | 重力自平衡上肢康复机器人设计与试验
-

开发应用 | 齿轮箱非平衡故障数据下的自适应诊断方法
开发应用 | 齿轮箱非平衡故障数据下的自适应诊断方法
-
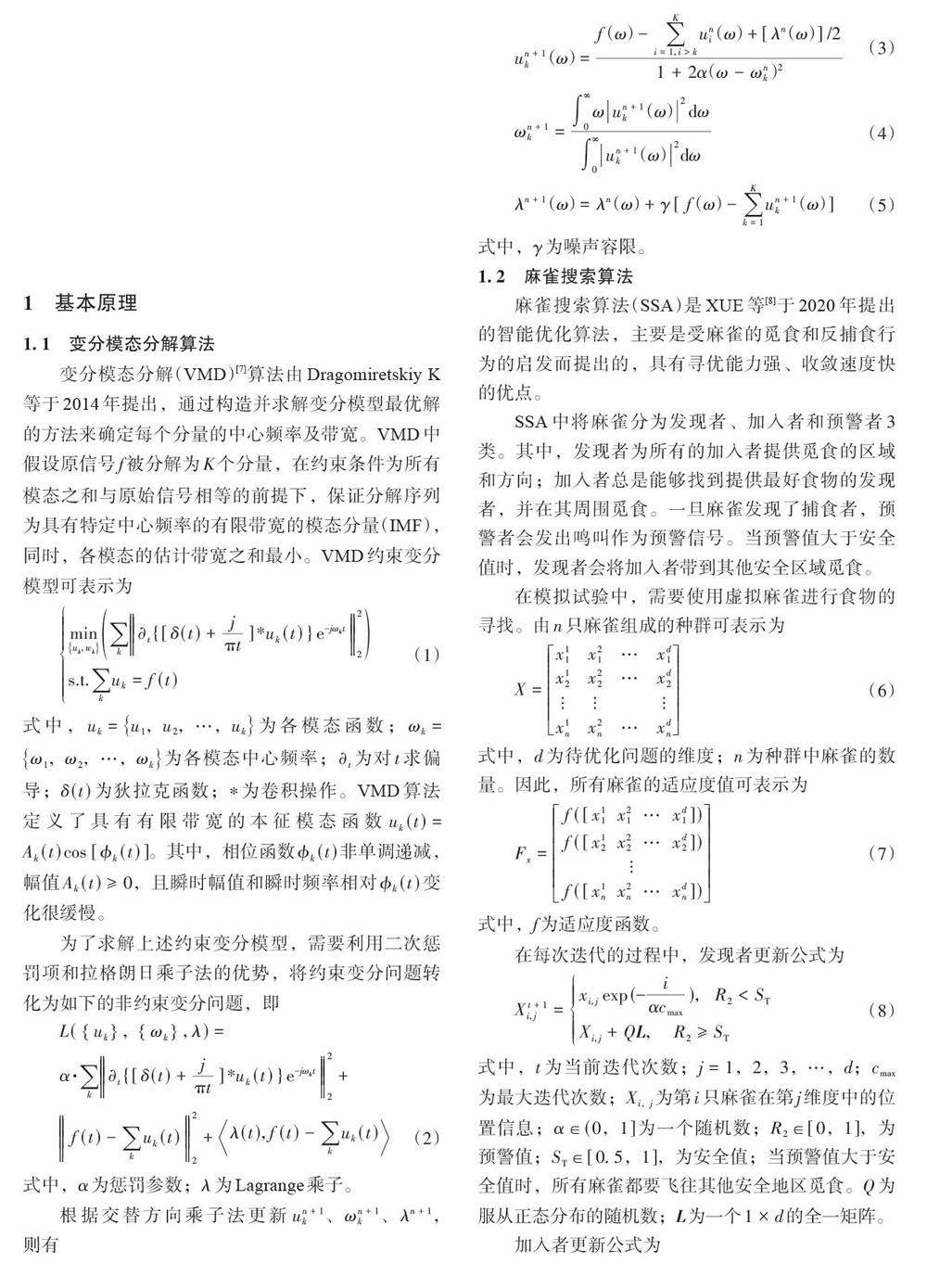
开发应用 | 基于参数优化VMD和改进GoogLeNet 的滚动轴承故障诊断
开发应用 | 基于参数优化VMD和改进GoogLeNet 的滚动轴承故障诊断
-
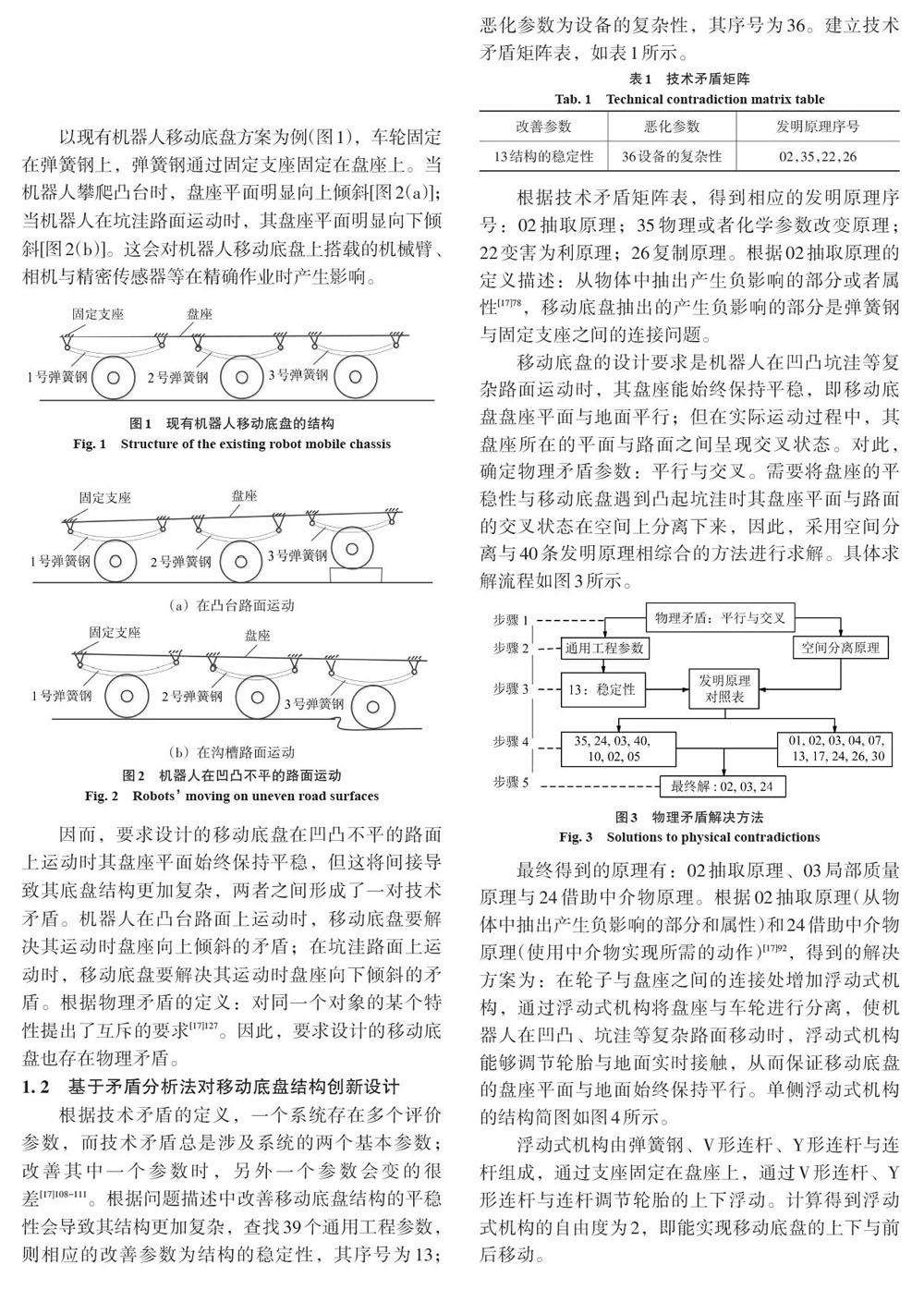
开发应用 | 基于TRIZ理论的巡检机器人移动底盘结构创新设计
开发应用 | 基于TRIZ理论的巡检机器人移动底盘结构创新设计




















 登录
登录