

目录
快速导航-
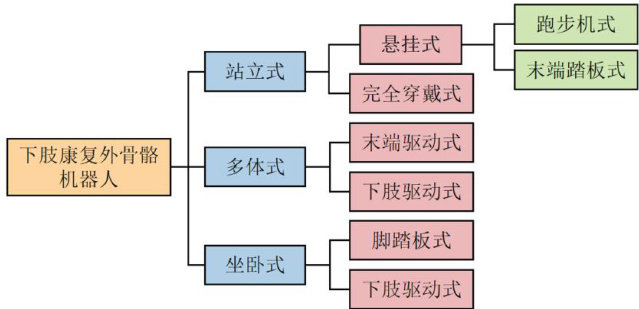
综述 | 下肢康复外骨骼机器人研究现状及应用进展
综述 | 下肢康复外骨骼机器人研究现状及应用进展
-

理论研究 | 弧齿锥齿轮温锻成形数值模拟及工艺参数优化
理论研究 | 弧齿锥齿轮温锻成形数值模拟及工艺参数优化
-
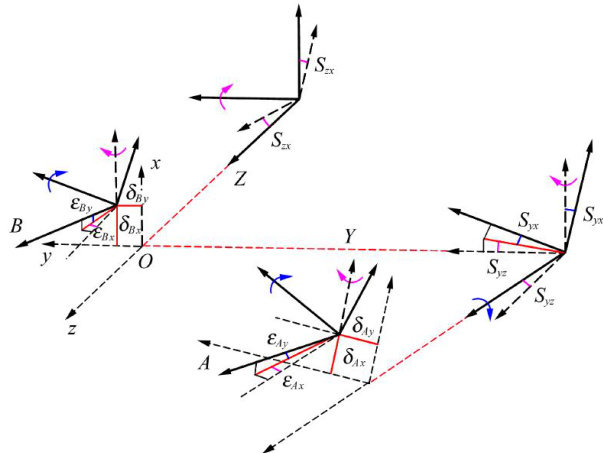
理论研究 | 轴向滚轧成形过程中机床误差与齿轮螺旋线偏差传递规律研究
理论研究 | 轴向滚轧成形过程中机床误差与齿轮螺旋线偏差传递规律研究
-
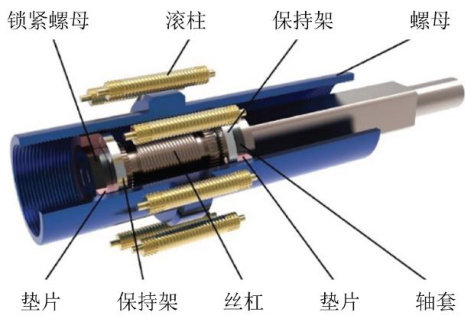
理论研究 | 反向式行星滚柱丝杠副的动力学建模及传动特性研究
理论研究 | 反向式行星滚柱丝杠副的动力学建模及传动特性研究
-

理论研究 | 基于加长悬臂梁模型的裂纹齿轮时变啮合刚度计算方法
理论研究 | 基于加长悬臂梁模型的裂纹齿轮时变啮合刚度计算方法
-
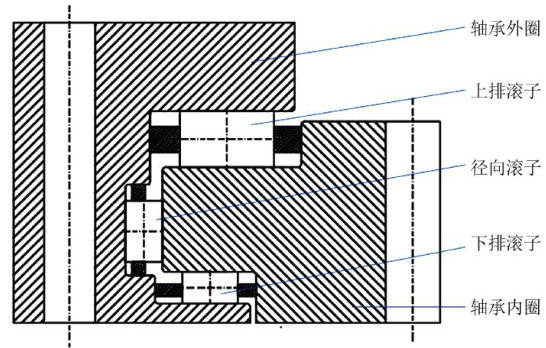
理论研究 | 基于非线性弹簧接触力模型的盾构机主轴承载荷分布优化研究
理论研究 | 基于非线性弹簧接触力模型的盾构机主轴承载荷分布优化研究
-
理论研究 | 基于无碰撞通道的启发式RRT机械臂路径规划算法
理论研究 | 基于无碰撞通道的启发式RRT机械臂路径规划算法
-
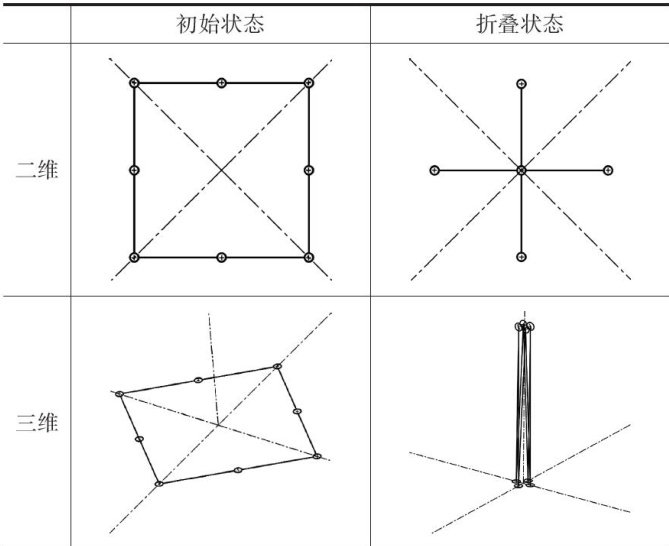
设计计算 | 一种新型塔式环形折展机构的设计与分析
设计计算 | 一种新型塔式环形折展机构的设计与分析
-
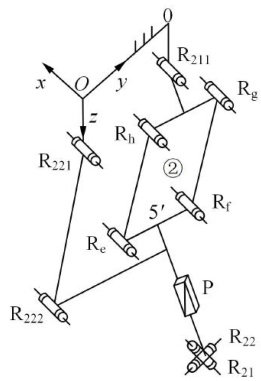
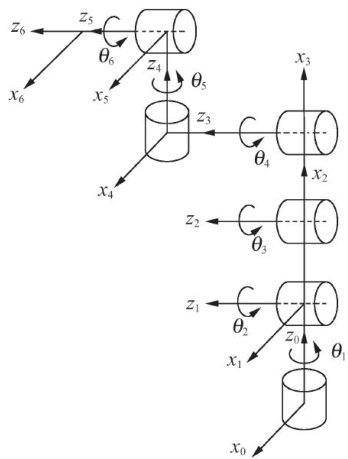
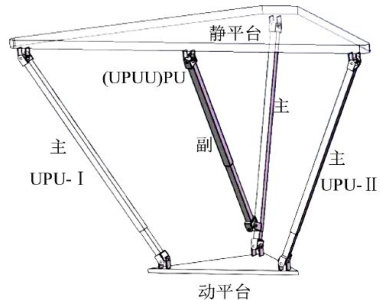
设计计算 | 变拓扑机械腿的运动解耦性设计及运动学分析
设计计算 | 变拓扑机械腿的运动解耦性设计及运动学分析
-
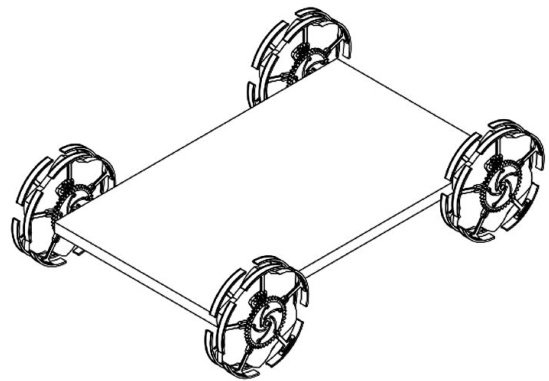
设计计算 | 面向复杂地形环境的移动机器人设计与分析
设计计算 | 面向复杂地形环境的移动机器人设计与分析
-

设计计算 | 复合丝传动微创手术器械结构设计与分析
设计计算 | 复合丝传动微创手术器械结构设计与分析
-
设计计算 | 可变式伸缩轮腿机器人行进机构设计与研究
设计计算 | 可变式伸缩轮腿机器人行进机构设计与研究
-

设计计算 | 一种双行走模式爬壁机器人的设计与运动分析
设计计算 | 一种双行走模式爬壁机器人的设计与运动分析
-
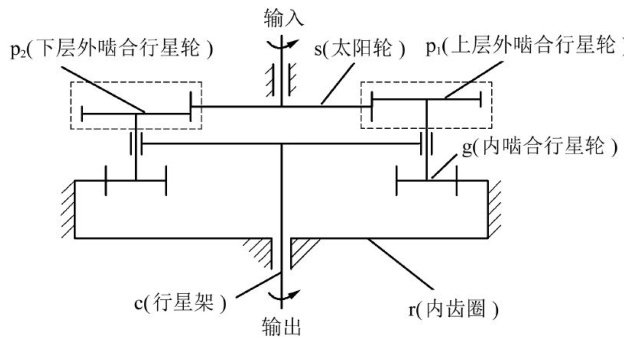
设计计算 | 叠层复合行星轮系参数的优化设计研究
设计计算 | 叠层复合行星轮系参数的优化设计研究
-
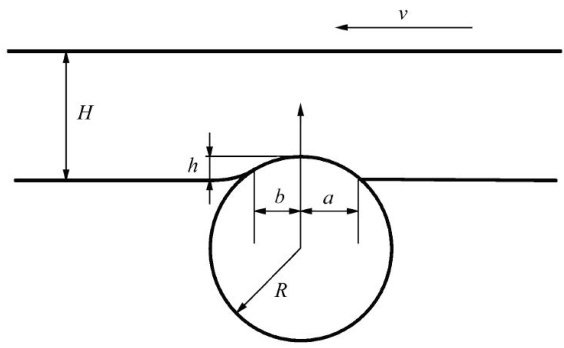
试验分析 | 基于赫兹接触理论的输送带压陷滚动阻力研究
试验分析 | 基于赫兹接触理论的输送带压陷滚动阻力研究
-

试验分析 | 基于HB、ISO与AGMA标准的弧齿锥齿轮齿面接触强度计算对比分析
试验分析 | 基于HB、ISO与AGMA标准的弧齿锥齿轮齿面接触强度计算对比分析
-
试验分析 | 基于双时频融合的动车组滚动轴承故障诊断
试验分析 | 基于双时频融合的动车组滚动轴承故障诊断
-
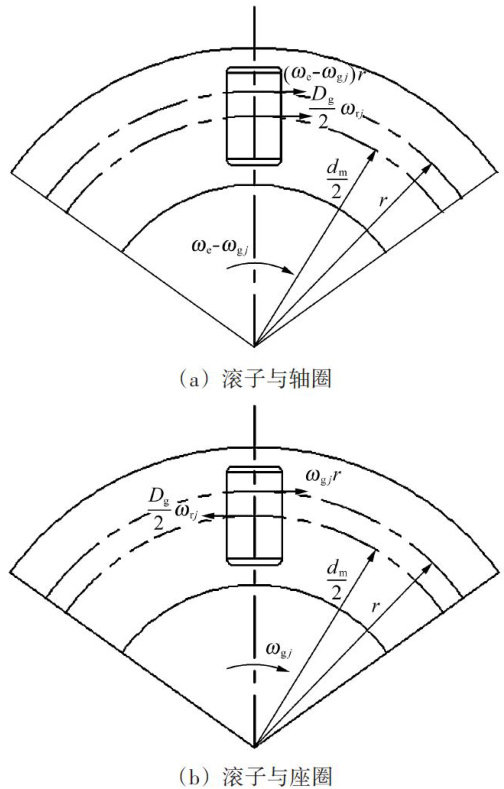
试验分析 | 圆柱滚子推力轴承滚滑及温升特性仿真研究
试验分析 | 圆柱滚子推力轴承滚滑及温升特性仿真研究
-

开发应用 | 螺旋对流式磁流变阻尼器传力性能研究
开发应用 | 螺旋对流式磁流变阻尼器传力性能研究
-

开发应用 | 基于STFT-SE-ResNet18模型的低速重载轴承故障诊断
开发应用 | 基于STFT-SE-ResNet18模型的低速重载轴承故障诊断




















 登录
登录