

目录
快速导航-

理论研究 | 一种并联摆辗机驱动布局选型分析与尺度综合
理论研究 | 一种并联摆辗机驱动布局选型分析与尺度综合
-

理论研究 | 柔性销轴式风电行星轮系动力学性能研究
理论研究 | 柔性销轴式风电行星轮系动力学性能研究
-
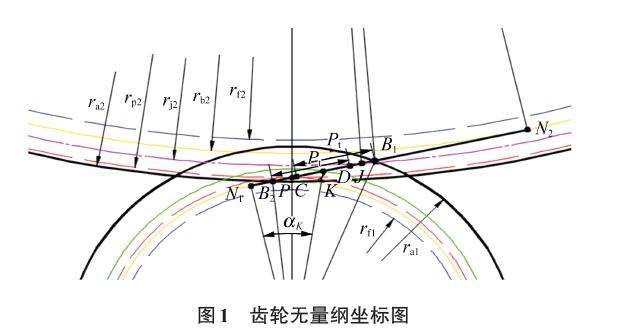
理论研究 | 低速重载点线啮合齿轮传动温度场及影响因素研究
理论研究 | 低速重载点线啮合齿轮传动温度场及影响因素研究
-
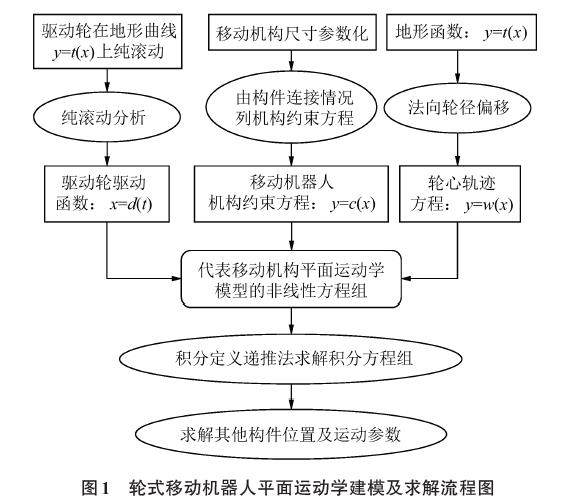
理论研究 | 轮式移动机器人平面运动学建模与分析
理论研究 | 轮式移动机器人平面运动学建模与分析
-
理论研究 | 内外部激励对风机齿轮传动系统均载特性的影响
理论研究 | 内外部激励对风机齿轮传动系统均载特性的影响
-
理论研究 | 考虑轴颈倾斜的动载滑动轴承混合弹流润滑特性研究
理论研究 | 考虑轴颈倾斜的动载滑动轴承混合弹流润滑特性研究
-
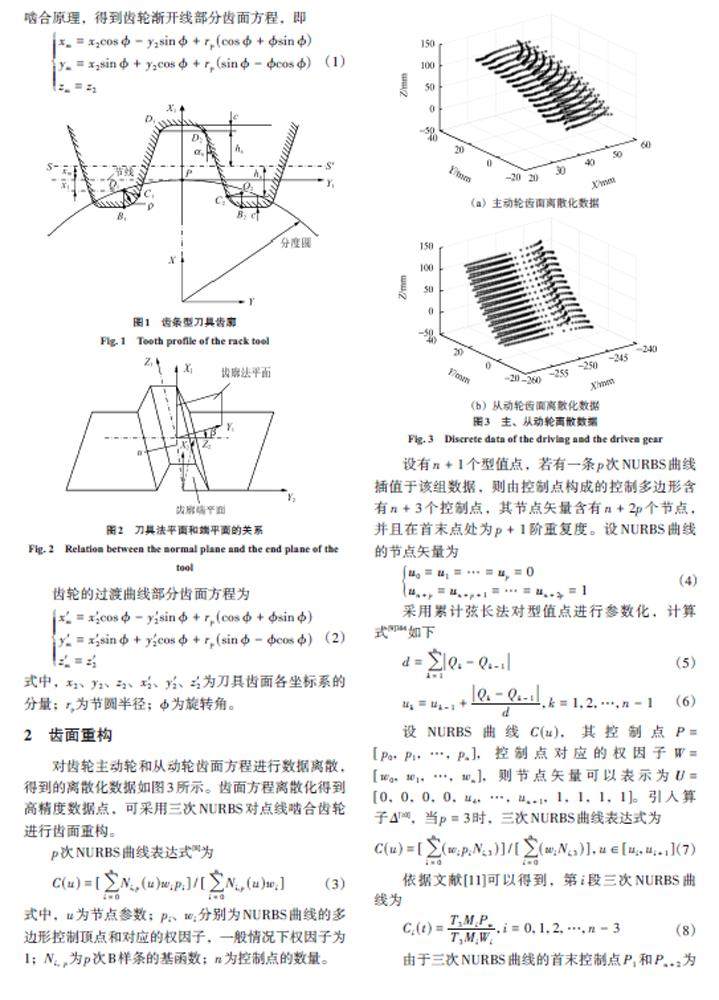
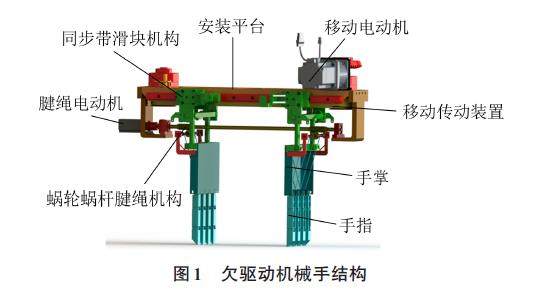
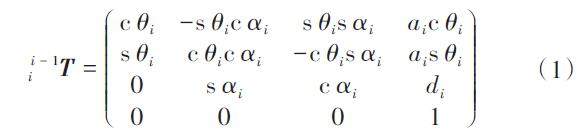
理论研究 | 基于三次NURBS 曲面插值的单点线啮合齿轮副建模
理论研究 | 基于三次NURBS 曲面插值的单点线啮合齿轮副建模
-
设计计算 | 混合工作模式的双路径传动欠驱动机械手设计与接触力学分析
设计计算 | 混合工作模式的双路径传动欠驱动机械手设计与接触力学分析
-
设计计算 | 基于改进蜣螂算法的机械臂路径规划
设计计算 | 基于改进蜣螂算法的机械臂路径规划
-
设计计算 | 自动焊接装置凸轮连杆机构的多目标优化设计
设计计算 | 自动焊接装置凸轮连杆机构的多目标优化设计
-
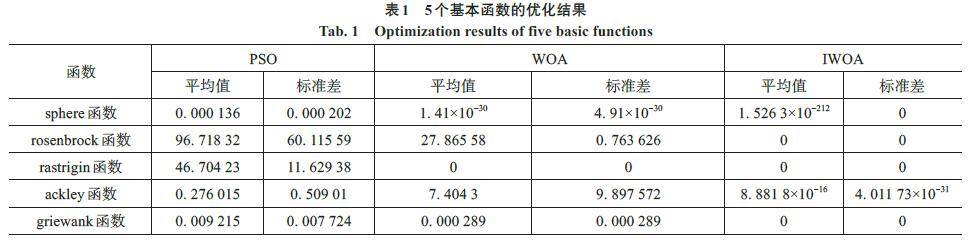
设计计算 | 基于一种改进鲸鱼优化算法的机器人逆运动学求解
设计计算 | 基于一种改进鲸鱼优化算法的机器人逆运动学求解
-

设计计算 | 基于海马优化的改进Informed-RRT*的路径规划算法
设计计算 | 基于海马优化的改进Informed-RRT*的路径规划算法
-
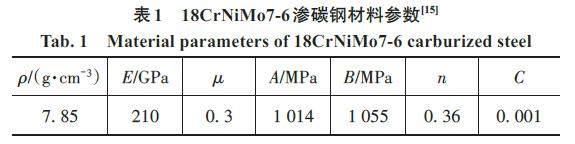
试验分析 | 二次喷丸对18CrNiMo7-6齿轮钢残余应力影响的有限元分析
试验分析 | 二次喷丸对18CrNiMo7-6齿轮钢残余应力影响的有限元分析
-
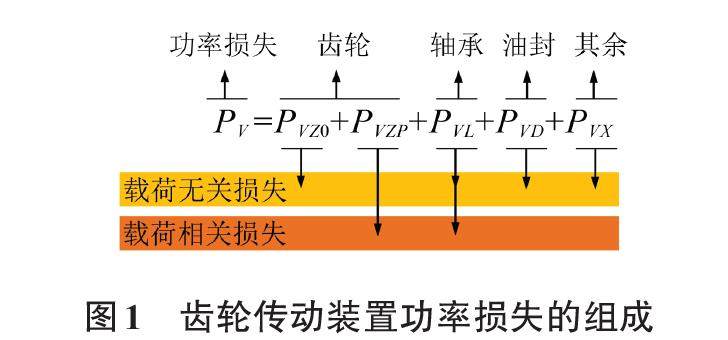
试验分析 | 润滑油对电驱桥功率损失影响的试验研究
试验分析 | 润滑油对电驱桥功率损失影响的试验研究
-

试验分析 | 风力发电机偏航齿轮箱太阳轮断齿失效分析
试验分析 | 风力发电机偏航齿轮箱太阳轮断齿失效分析
-
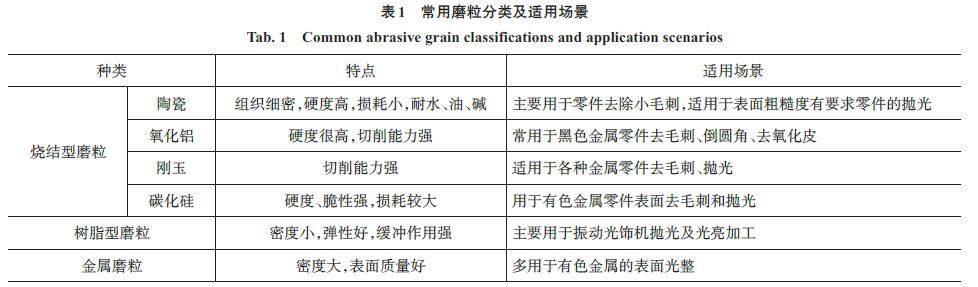
试验分析 | 振动光饰工艺参数与表面形貌关联规律试验研究
试验分析 | 振动光饰工艺参数与表面形貌关联规律试验研究
-
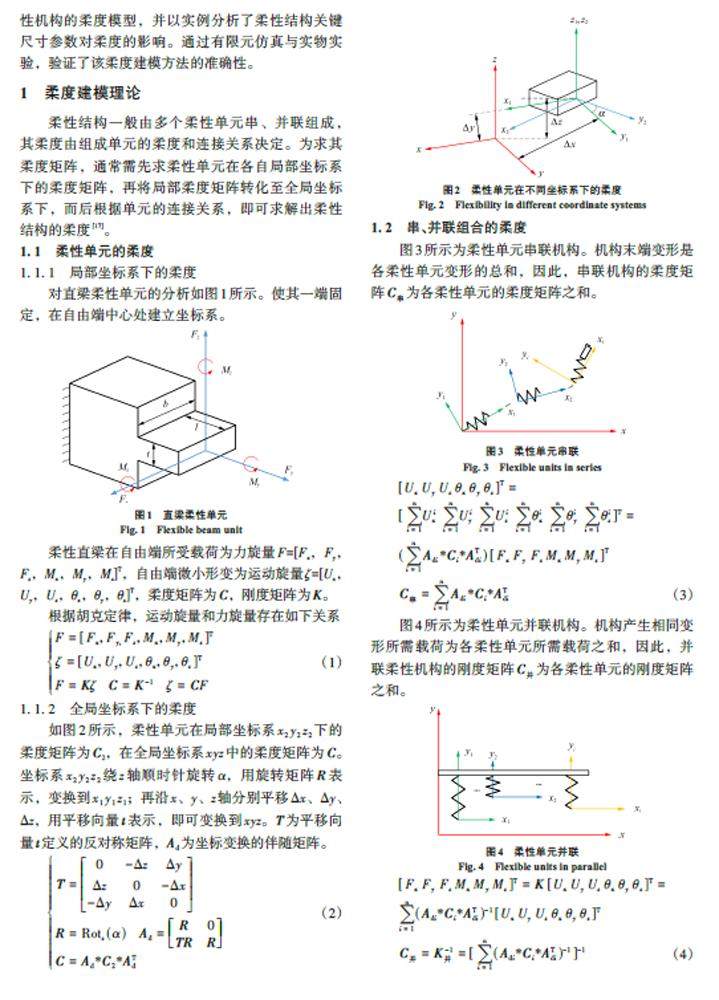
试验分析 | S 型柔性结构的柔度建模与验证分析
试验分析 | S 型柔性结构的柔度建模与验证分析
-

试验分析 | 航空齿轮滚磨光整工艺离散元仿真与试验研究
试验分析 | 航空齿轮滚磨光整工艺离散元仿真与试验研究
-

开发应用 | 基于ZMP的多姿态多功能下肢辅助装置设计及稳定性分析
开发应用 | 基于ZMP的多姿态多功能下肢辅助装置设计及稳定性分析
-
开发应用 | 大转矩下风机膜片联轴器结构参数优化设计
开发应用 | 大转矩下风机膜片联轴器结构参数优化设计
-

开发应用 | 基于3-UPS/PPR的推拿机器人运动学分析及仿真
开发应用 | 基于3-UPS/PPR的推拿机器人运动学分析及仿真
-

开发应用 | 基于GMDE和MFO-MKELM算法的往复压缩机轴承故障诊断研究
开发应用 | 基于GMDE和MFO-MKELM算法的往复压缩机轴承故障诊断研究




















 登录
登录