

目录
快速导航-
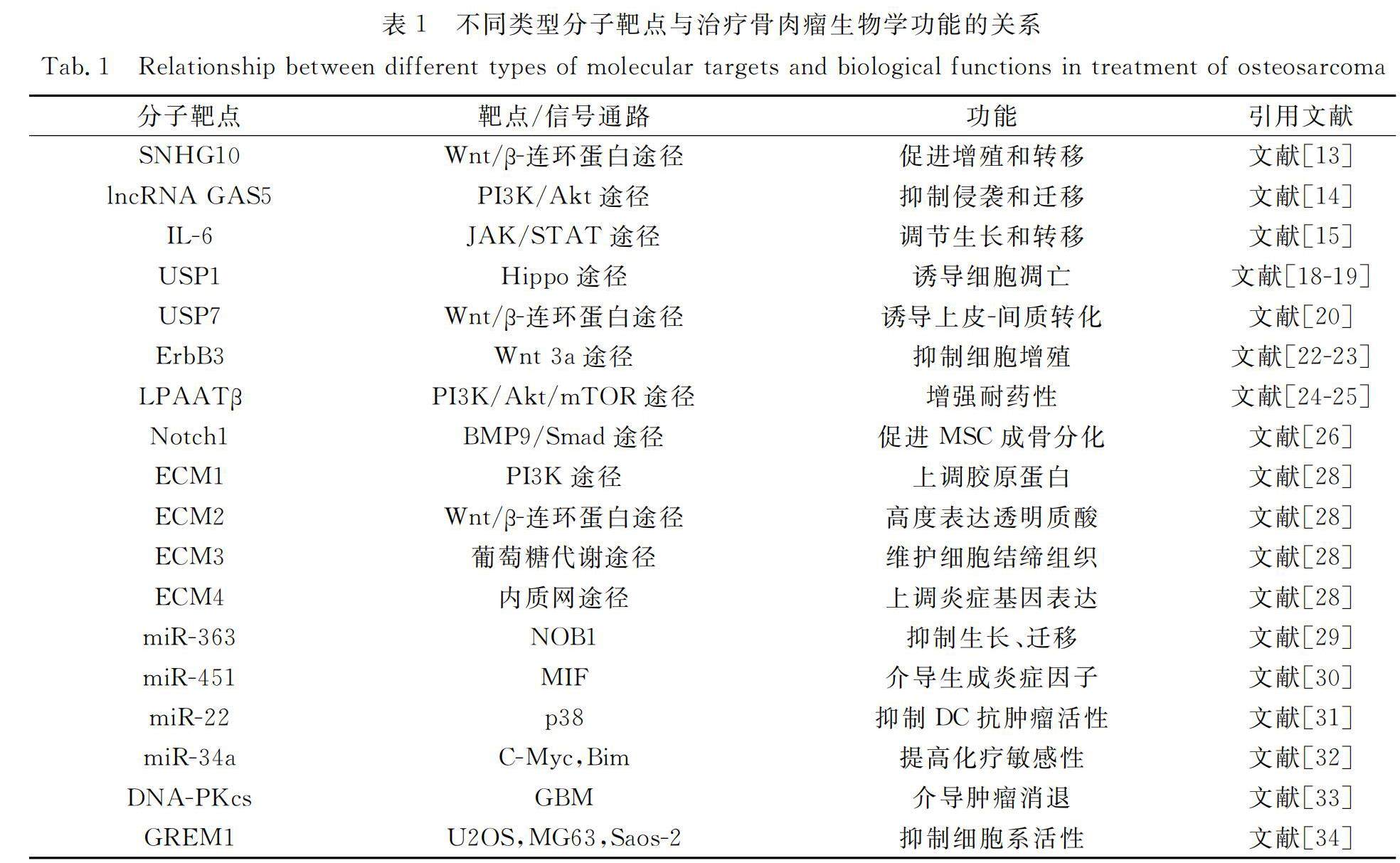
综合述评 | 间充质干细胞外泌体在骨肉瘤治疗中的研究进展
综合述评 | 间充质干细胞外泌体在骨肉瘤治疗中的研究进展
-
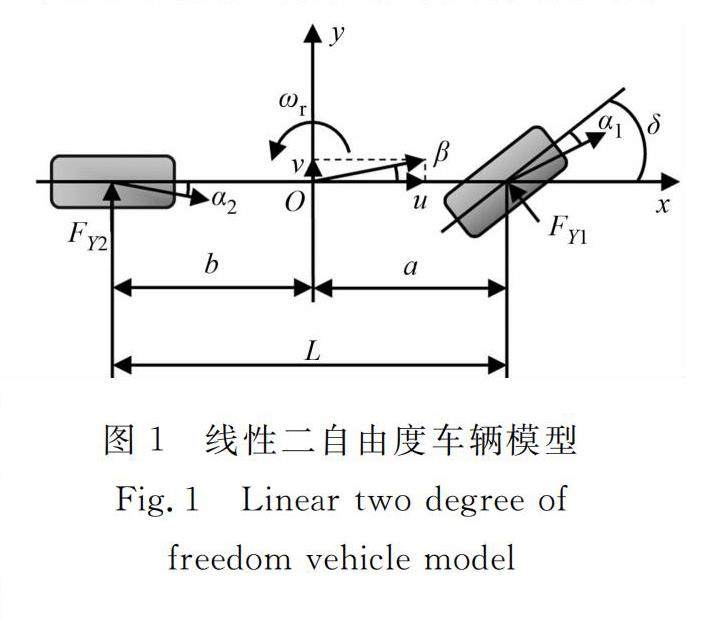
学术论文 | 分布式后驱电动客车电子差速控制策略
学术论文 | 分布式后驱电动客车电子差速控制策略
-

学术论文 | 粒子群算法优化的车辆悬架座椅模糊PID控制
学术论文 | 粒子群算法优化的车辆悬架座椅模糊PID控制
-
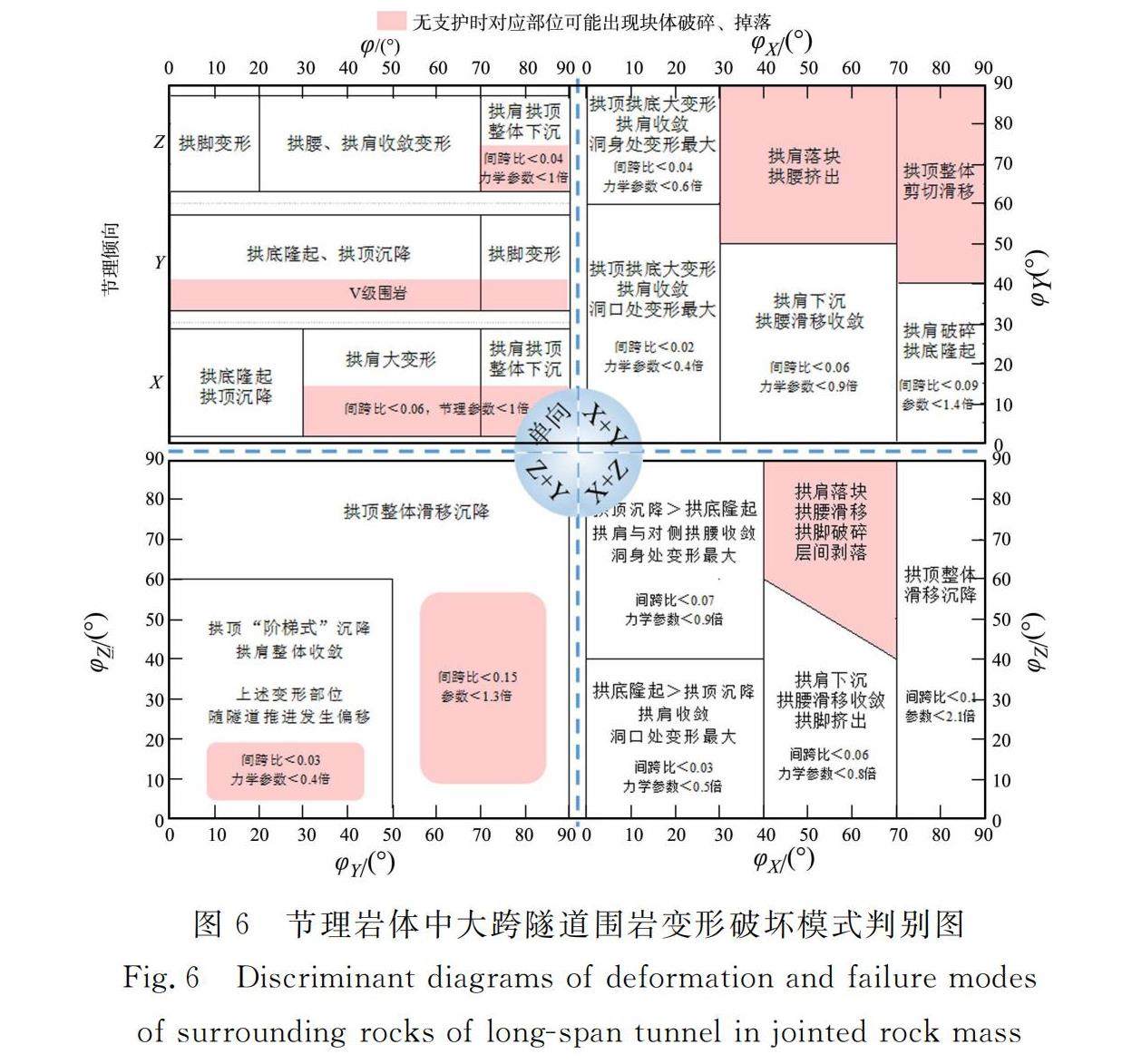
学术论文 | 节理岩体中大跨隧道围岩变形破坏模式分析
学术论文 | 节理岩体中大跨隧道围岩变形破坏模式分析
-
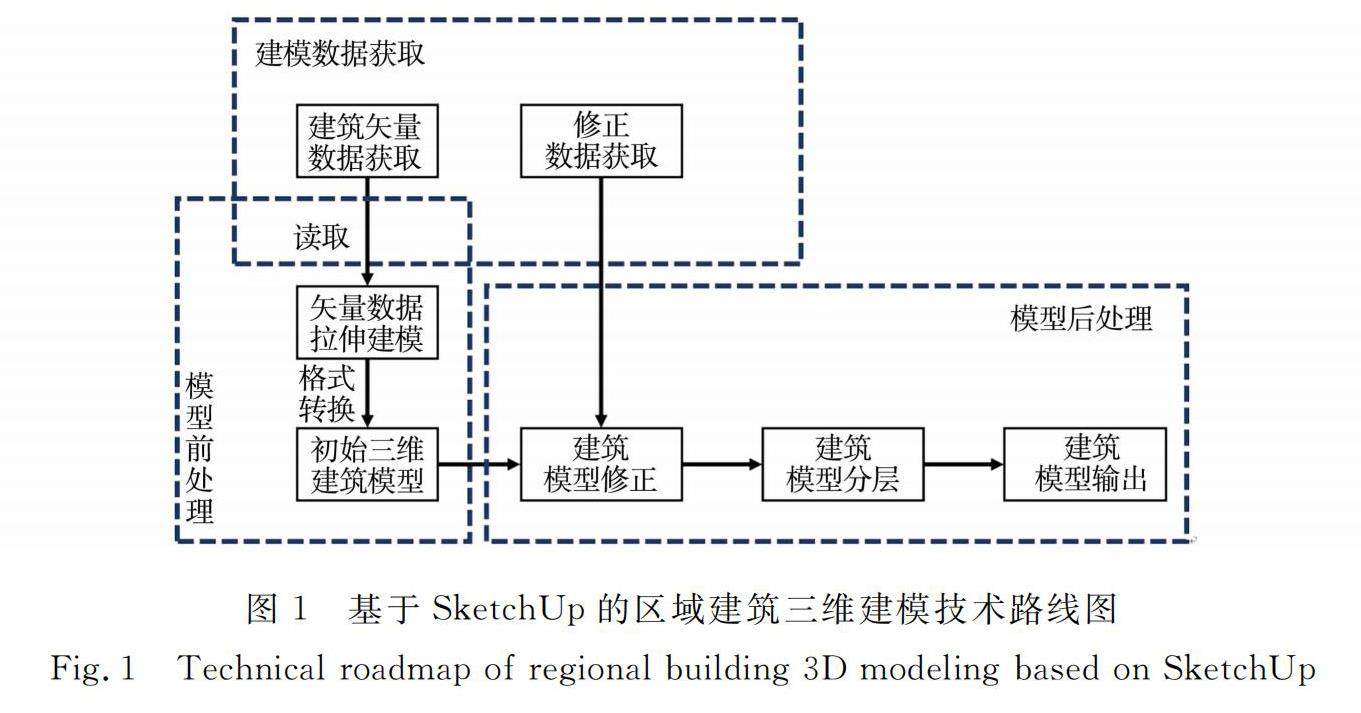
学术论文 | 基于SketchUp和OSG的区域建筑震害模拟三维动态可视化
学术论文 | 基于SketchUp和OSG的区域建筑震害模拟三维动态可视化
-
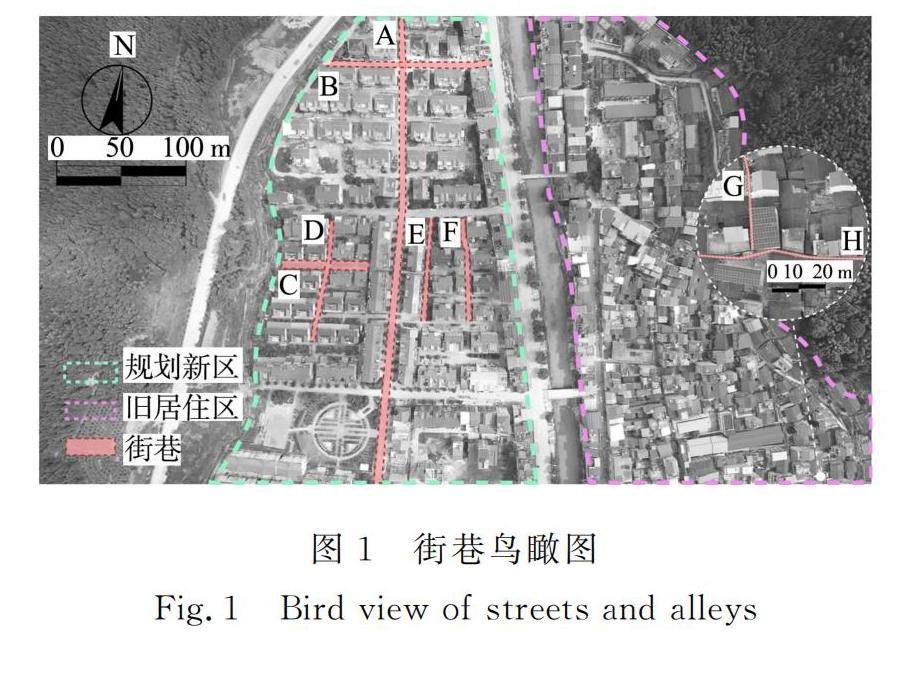
学术论文 | 夏热冬冷地区村镇典型街巷冬季热环境实测与分析
学术论文 | 夏热冬冷地区村镇典型街巷冬季热环境实测与分析
-
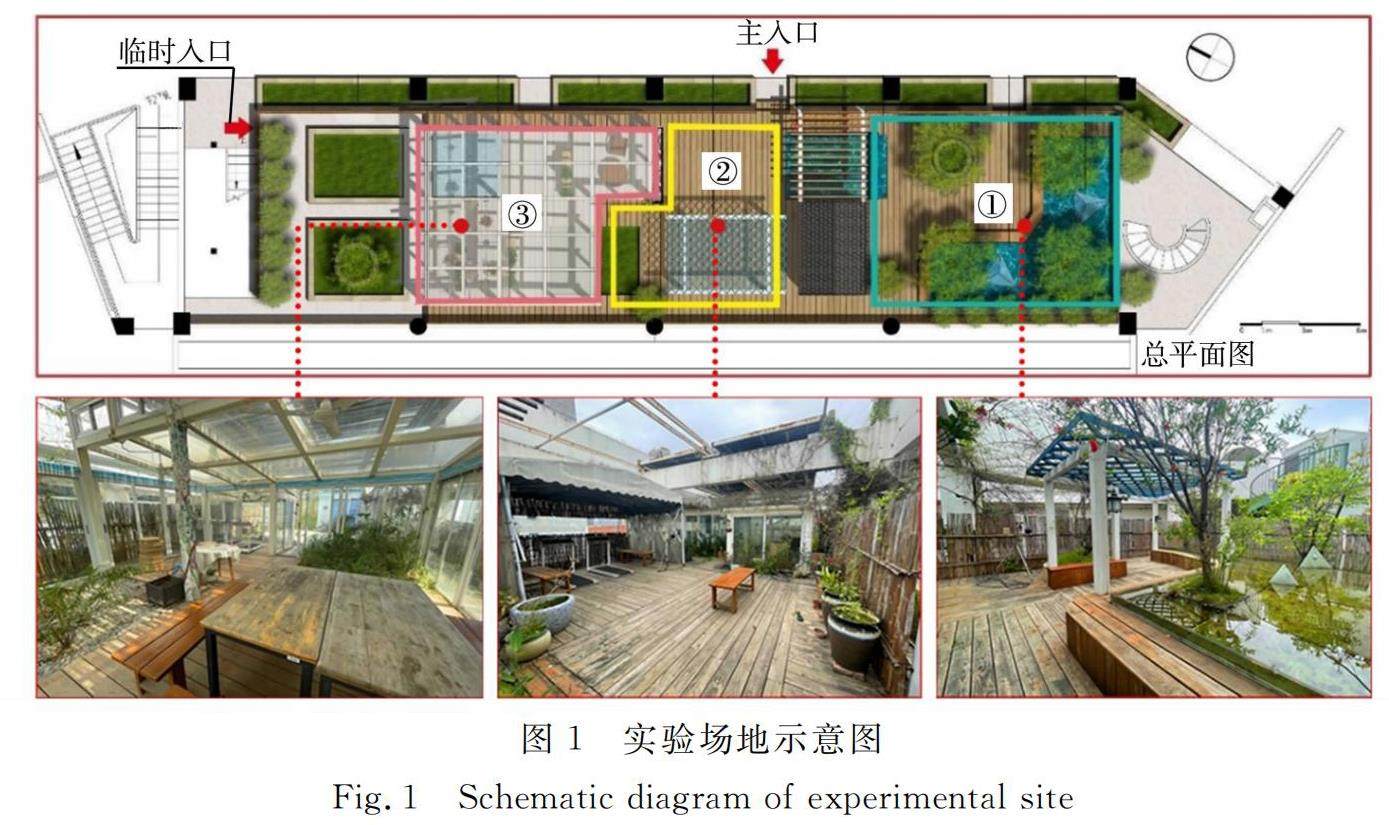
学术论文 | 屋顶花园空间感知与恢复绩效的关联性
学术论文 | 屋顶花园空间感知与恢复绩效的关联性
-
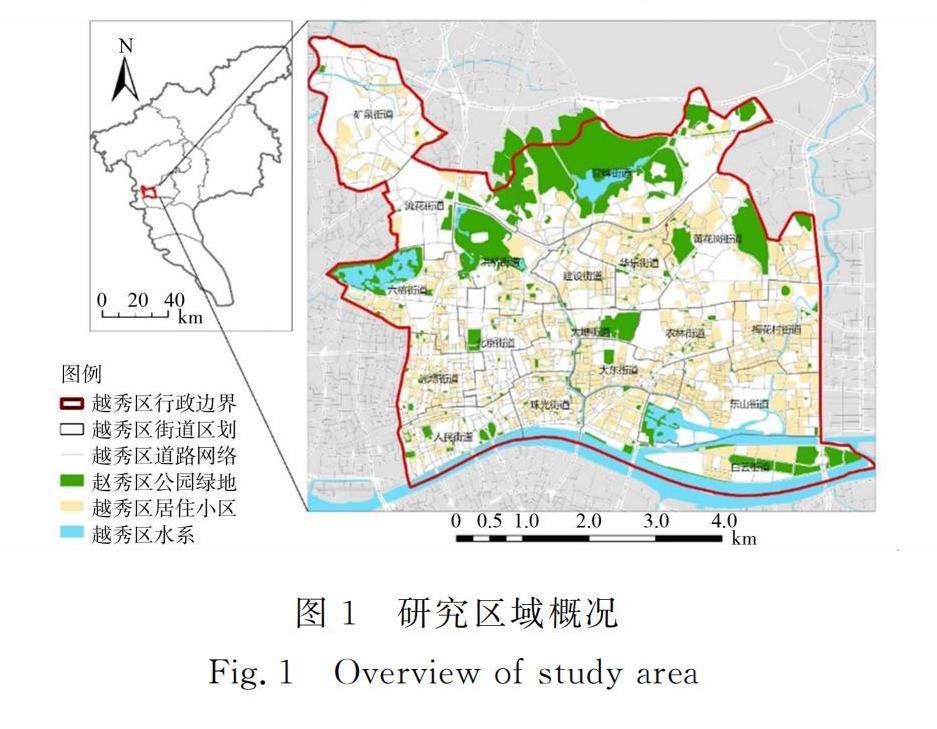
学术论文 | 供需视角下的城市公园绿地空间评价及优化
学术论文 | 供需视角下的城市公园绿地空间评价及优化
-
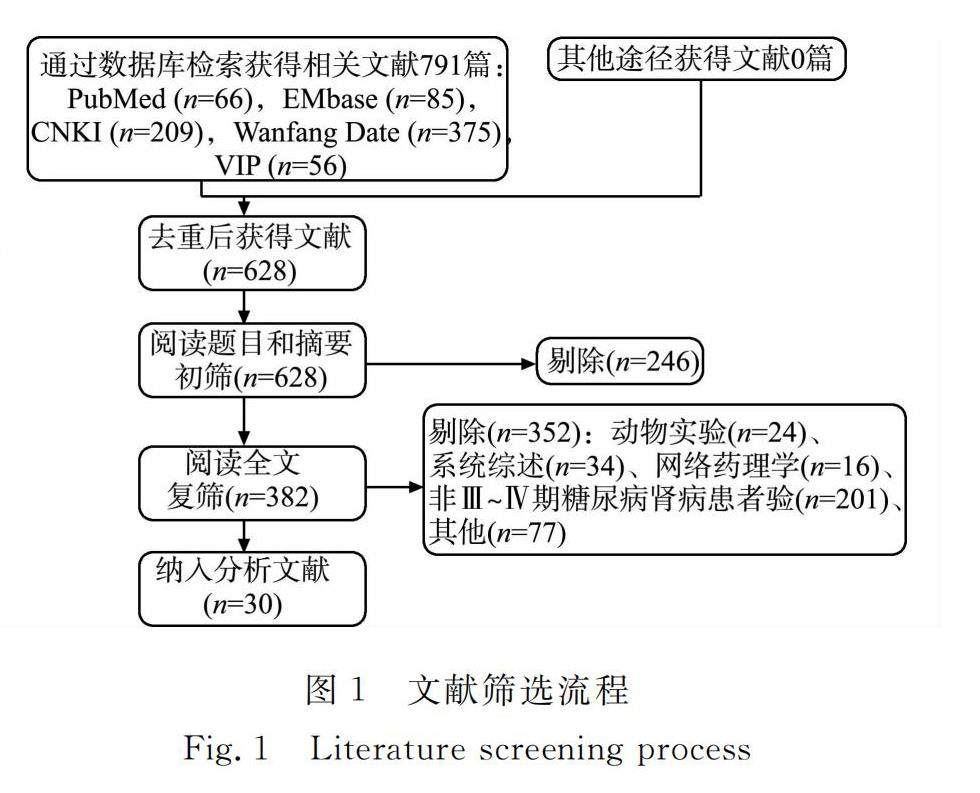
学术论文 | 中药治疗糖尿病肾病的伞状系统评价
学术论文 | 中药治疗糖尿病肾病的伞状系统评价
-
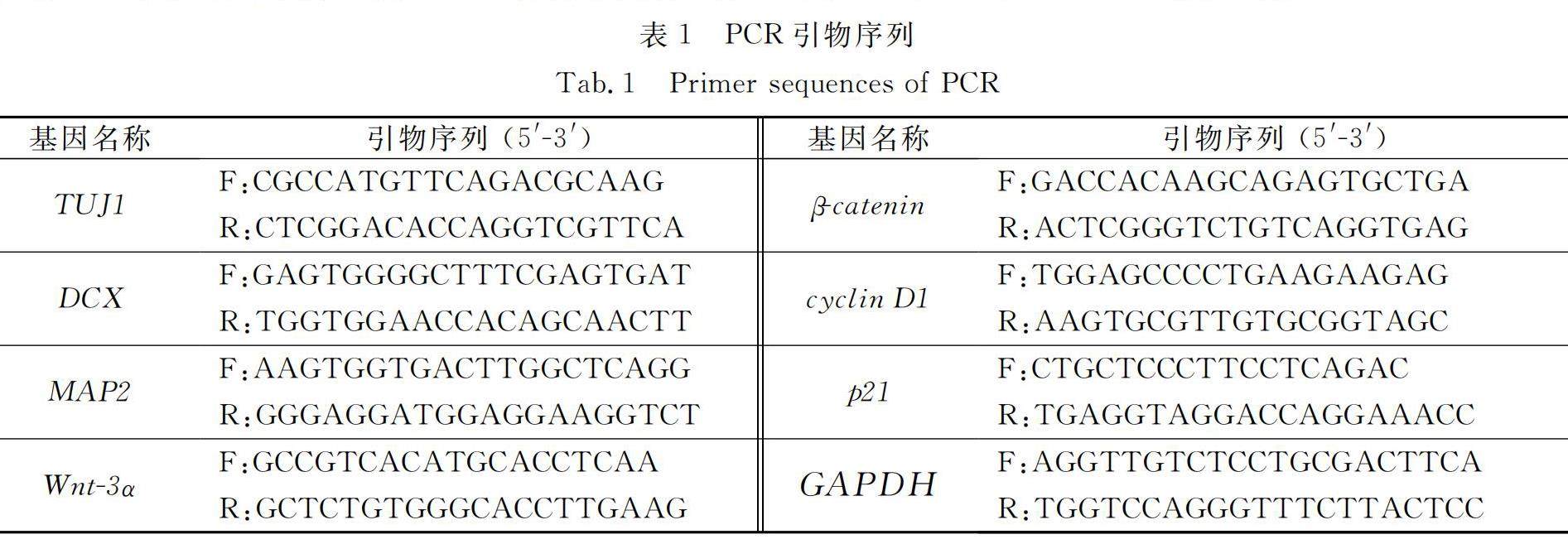
学术论文 | 丙戊酸促进小鼠神经干细胞分化成神经元及其影响机制
学术论文 | 丙戊酸促进小鼠神经干细胞分化成神经元及其影响机制
-
学术论文 | 融合距离引导式A*算法与动态窗口法的移动机器人路径规划
学术论文 | 融合距离引导式A*算法与动态窗口法的移动机器人路径规划
-

学术论文 | 机器学习模型交易中的数据购买量与模型定价
学术论文 | 机器学习模型交易中的数据购买量与模型定价
-

学术论文 | 应用重心插值的Burgers方程数值解法
学术论文 | 应用重心插值的Burgers方程数值解法
-
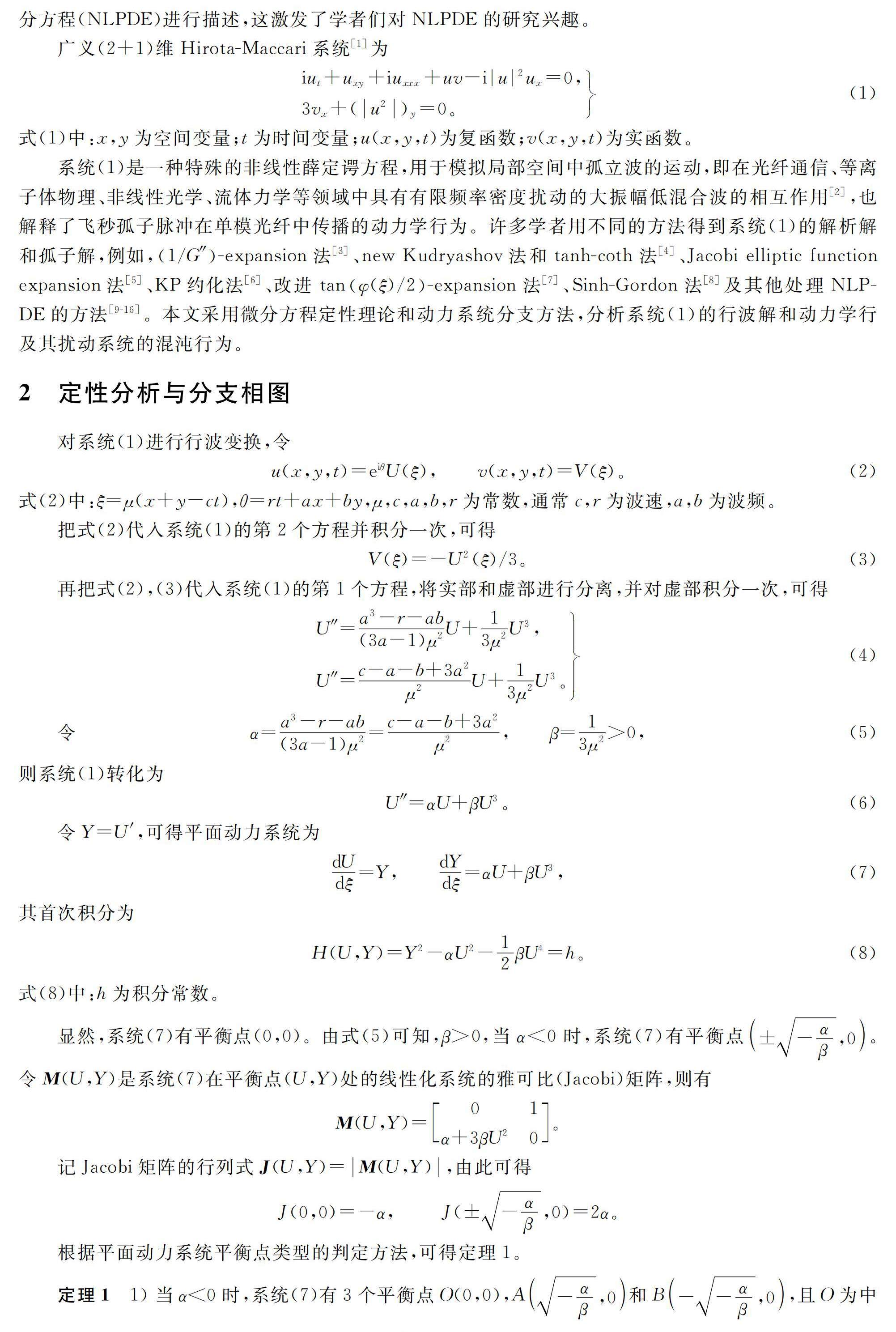
学术论文 | 广义(2+1)维Hirota-Maccari系统的动力学及混沌行为
学术论文 | 广义(2+1)维Hirota-Maccari系统的动力学及混沌行为












 登录
登录