
目录
快速导航-

智能汽车驾驶决策与控制 | 基于多模型自适应方法的智能汽车路径跟踪控制
智能汽车驾驶决策与控制 | 基于多模型自适应方法的智能汽车路径跟踪控制
-
智能汽车驾驶决策与控制 | 建立安全换道域的换道决策与规划
智能汽车驾驶决策与控制 | 建立安全换道域的换道决策与规划
-
智能汽车驾驶决策与控制 | 高速公路弯道换道决策及运动规划优化
智能汽车驾驶决策与控制 | 高速公路弯道换道决策及运动规划优化
-

智能汽车驾驶决策与控制 | 基于改进粒子滤波算法的车速估计
智能汽车驾驶决策与控制 | 基于改进粒子滤波算法的车速估计
-
智能汽车驾驶决策与控制 | 路侧侵扰影响下的机动车速度特性分析及预测
智能汽车驾驶决策与控制 | 路侧侵扰影响下的机动车速度特性分析及预测
-
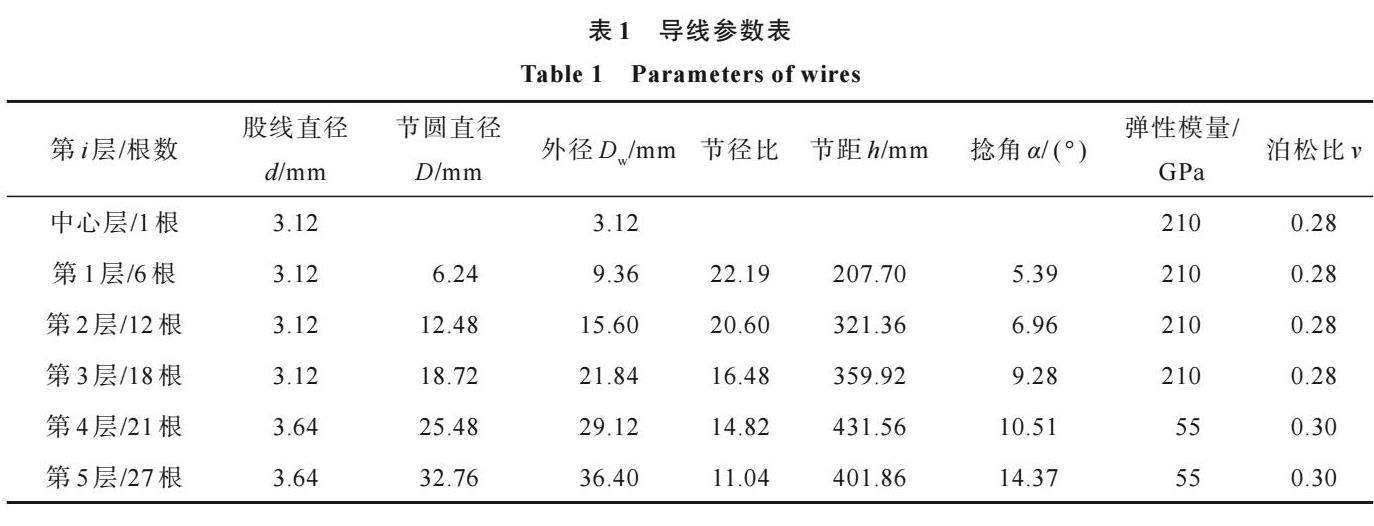
电气·机械工程 | 大跨越架空输电导线铝部应力分布试验
电气·机械工程 | 大跨越架空输电导线铝部应力分布试验
-
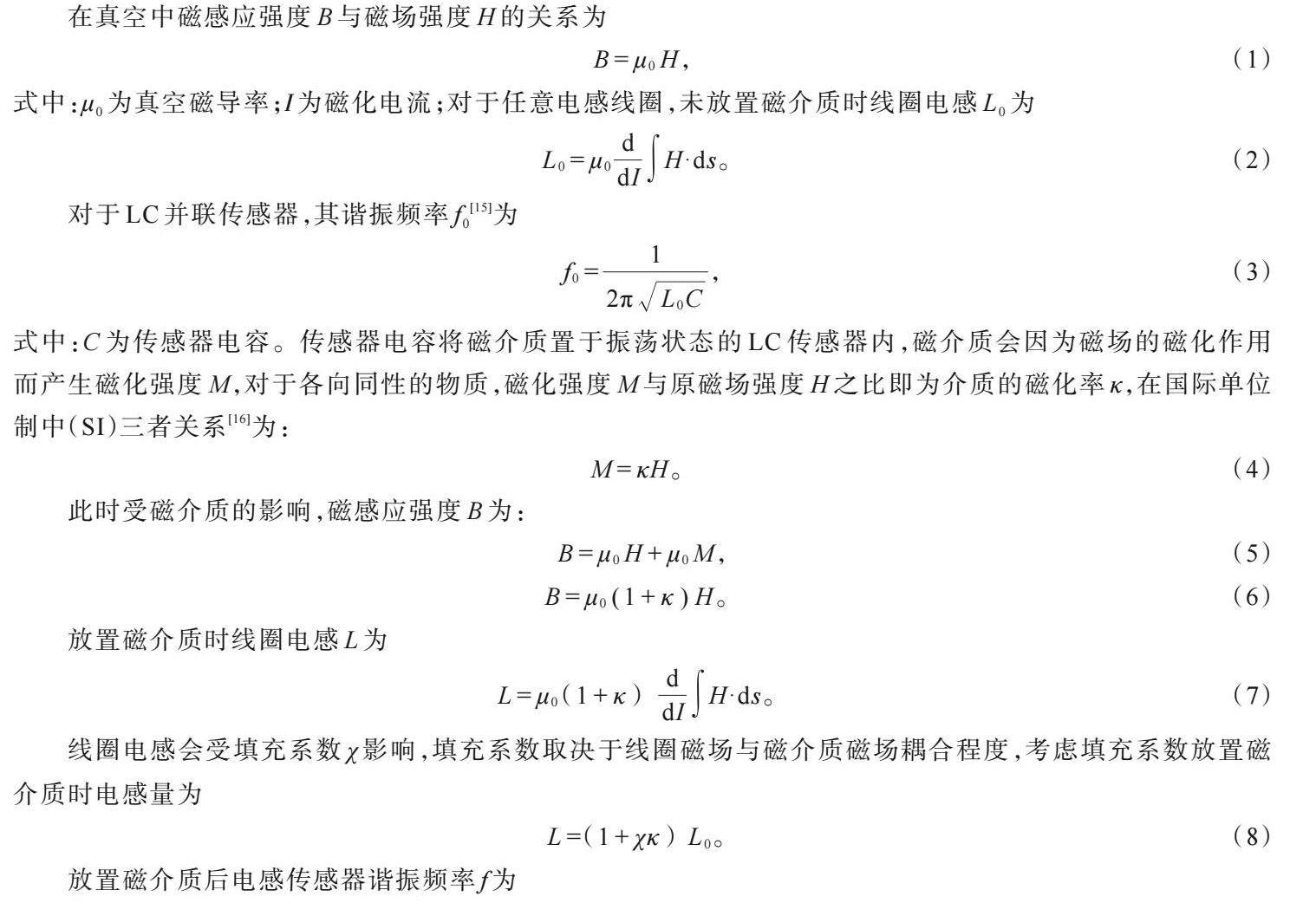
电气·机械工程 | 谐振法手持式智能磁化率仪设计
电气·机械工程 | 谐振法手持式智能磁化率仪设计
-
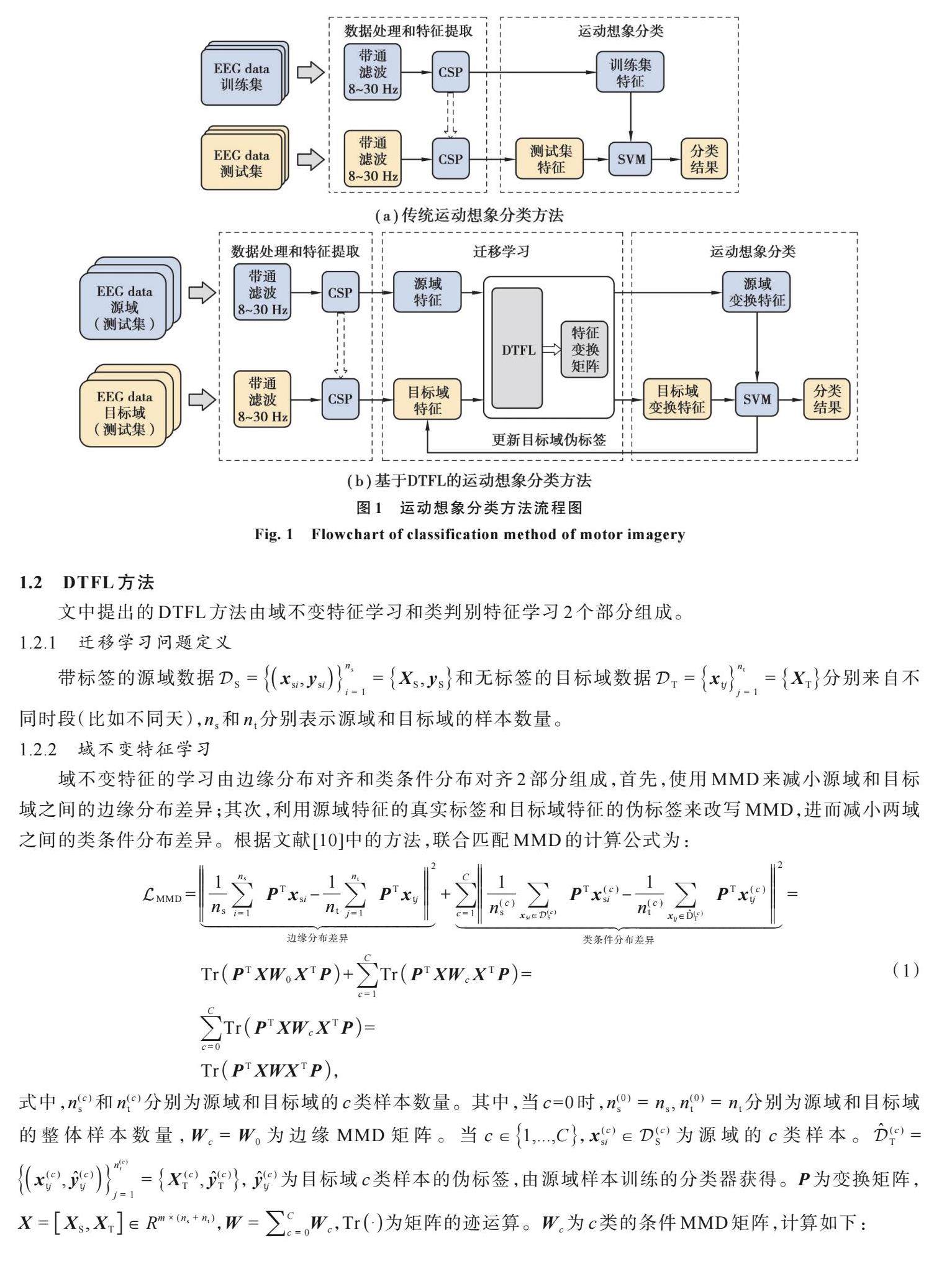
电气·机械工程 | 运动想象脑机接口的判别迁移特征学习与分类
电气·机械工程 | 运动想象脑机接口的判别迁移特征学习与分类
-
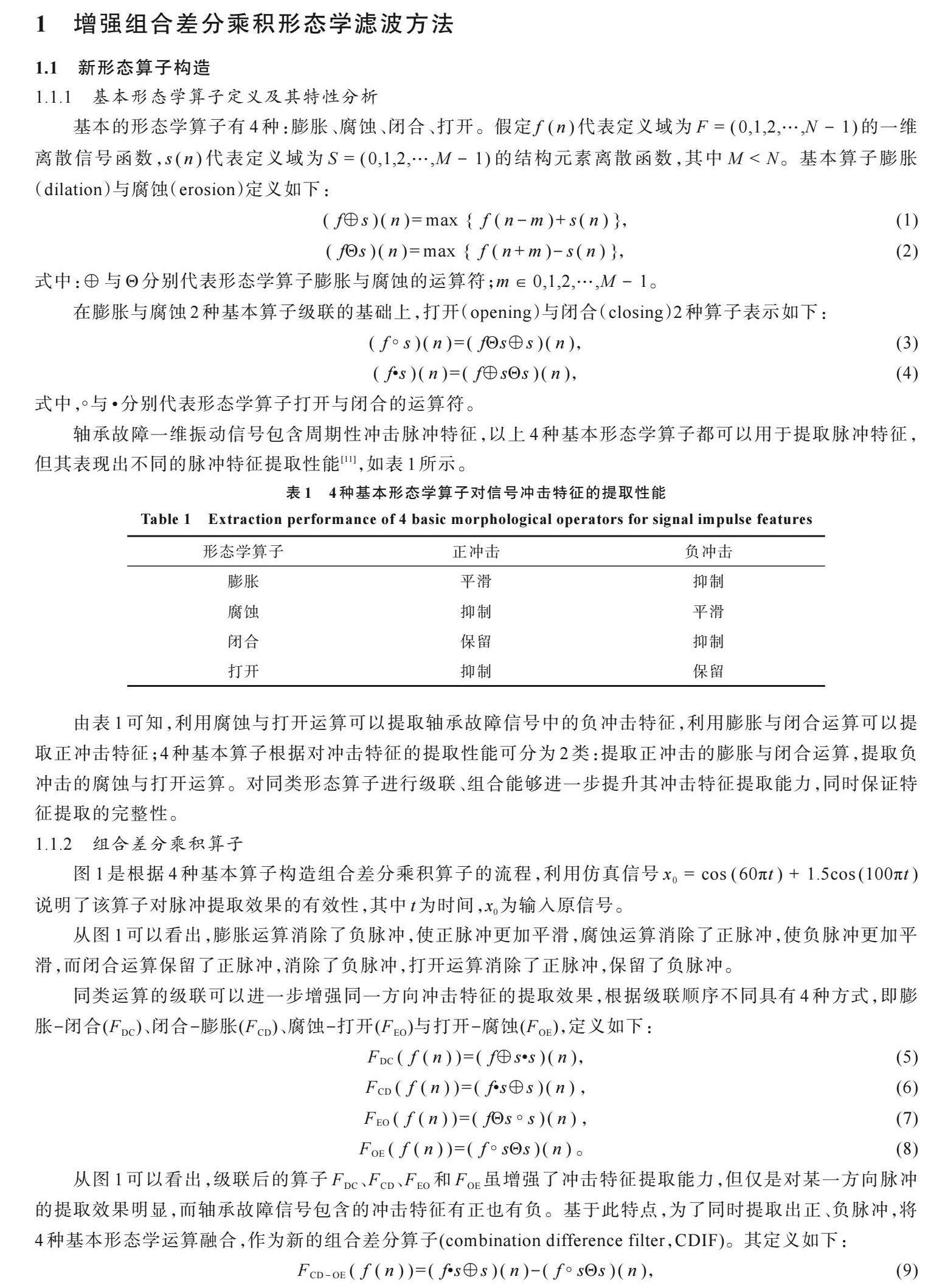
电气·机械工程 | 增强组合差分乘积形态学滤波的轴承故障特征提取方法
电气·机械工程 | 增强组合差分乘积形态学滤波的轴承故障特征提取方法
-

电气·机械工程 | 面向控制的一维非等温两相流燃料电池模型研究
电气·机械工程 | 面向控制的一维非等温两相流燃料电池模型研究
-

电气·机械工程 | 壳体柔性对风电齿轮箱-发电机集成系统动态特性影响
电气·机械工程 | 壳体柔性对风电齿轮箱-发电机集成系统动态特性影响
-

电气·机械工程 | 环境参数对风电齿轮箱传动系统疲劳损伤的影响
电气·机械工程 | 环境参数对风电齿轮箱传动系统疲劳损伤的影响















 登录
登录