
目录
快速导航-
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于脑电特征的虚拟现实诱发自动驾驶晕动症识别
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于脑电特征的虚拟现实诱发自动驾驶晕动症识别
-
智能驾驶中人因状态多模态信息监测与识别技术专题 | 转弯和直行场景下驾驶员认知分心识别的研究
智能驾驶中人因状态多模态信息监测与识别技术专题 | 转弯和直行场景下驾驶员认知分心识别的研究
-
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于改进YOLOv8n的环卫车辆驾驶员疲劳检测方法
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于改进YOLOv8n的环卫车辆驾驶员疲劳检测方法
-
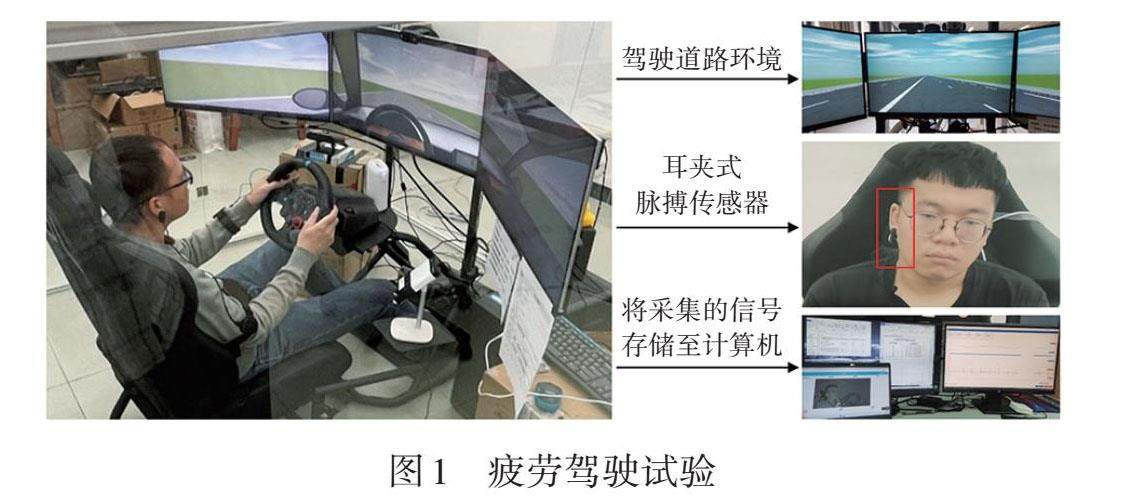
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于集成学习和脉搏多维特征融合的驾驶疲劳检测方法
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于集成学习和脉搏多维特征融合的驾驶疲劳检测方法
-
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于图时空注意力的多车交互轨迹预测模型
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于图时空注意力的多车交互轨迹预测模型
-
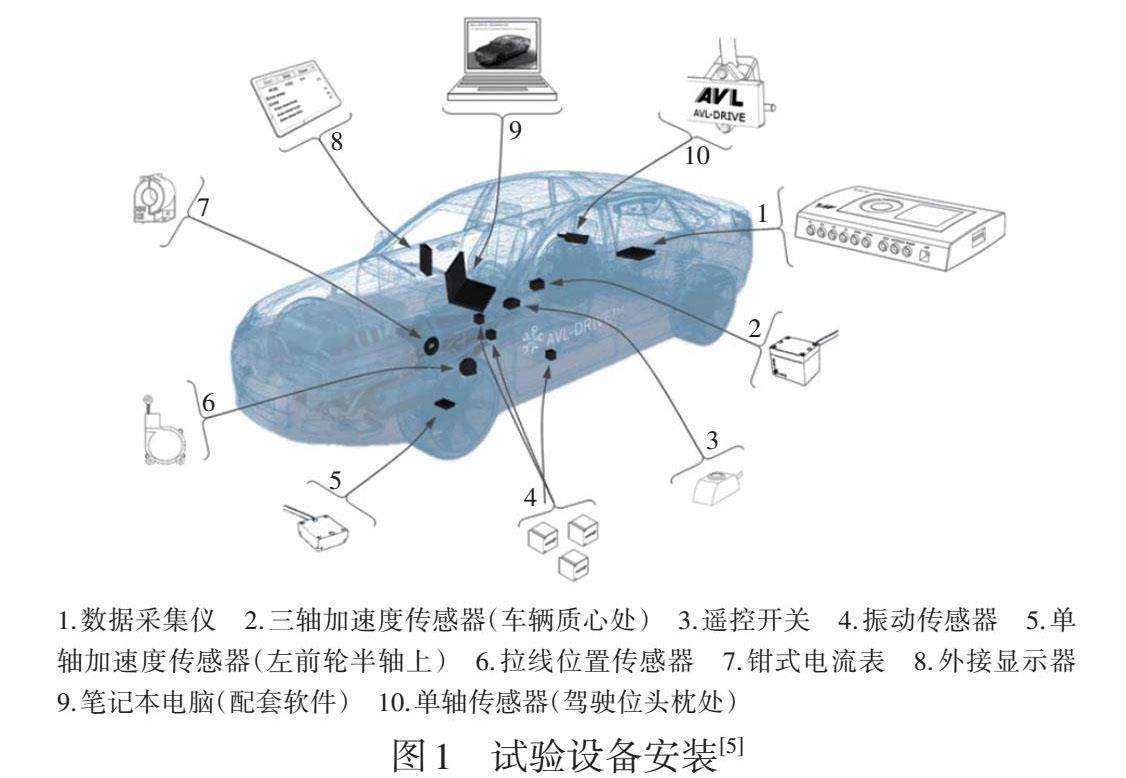
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于IHHO-Stacking集成模型的车辆驾驶性评估
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于IHHO-Stacking集成模型的车辆驾驶性评估
-
智能驾驶中人因状态多模态信息监测与识别技术专题 | 分布式电驱动承载平台的动力学建模与模型预测控制
智能驾驶中人因状态多模态信息监测与识别技术专题 | 分布式电驱动承载平台的动力学建模与模型预测控制
-
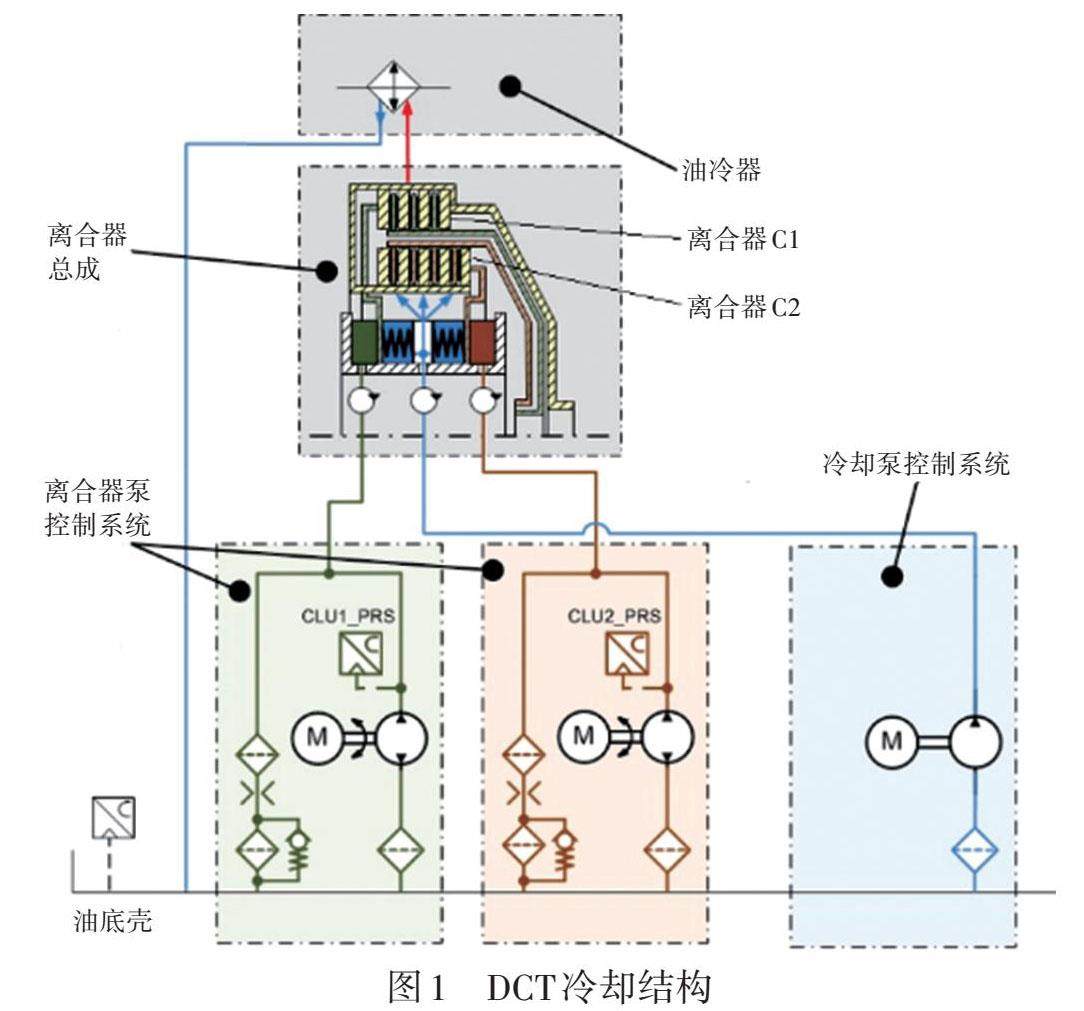
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于双离合变速器的起步控制优化研究
智能驾驶中人因状态多模态信息监测与识别技术专题 | 基于双离合变速器的起步控制优化研究













 登录
登录