
目录
快速导航-

综述与展望 | 电动汽车与清洁能源融合发展技术研究与展望
综述与展望 | 电动汽车与清洁能源融合发展技术研究与展望
-

汽车安全 | 基于非线性空气弹簧模型的整车仿真与主客观评价
汽车安全 | 基于非线性空气弹簧模型的整车仿真与主客观评价
-
汽车安全 | 车用CFRP 层压圆柱壳冲击损伤分析及最小穿透能量预测
汽车安全 | 车用CFRP 层压圆柱壳冲击损伤分析及最小穿透能量预测
-

汽车安全 | 偏置碰撞中落地式油门踏板对驾驶员小腿损伤特征及保护
汽车安全 | 偏置碰撞中落地式油门踏板对驾驶员小腿损伤特征及保护
-
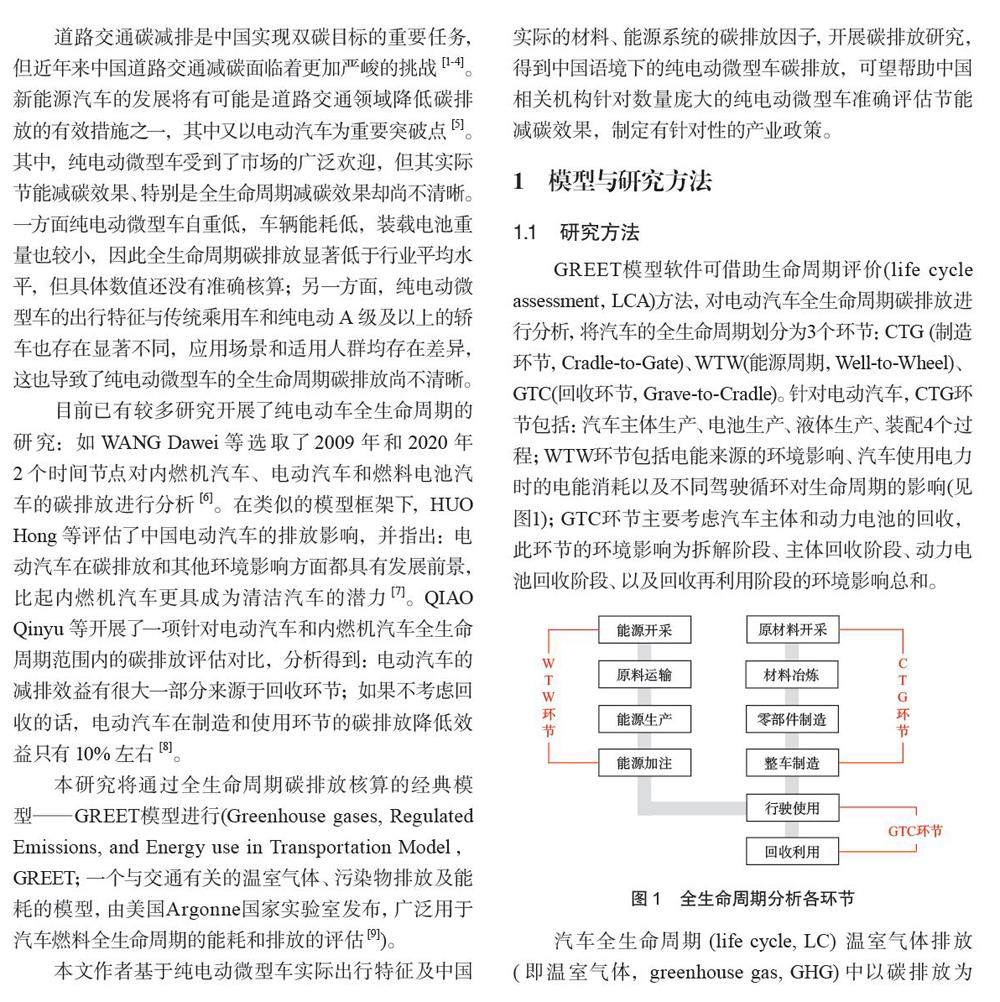
汽车节能与环保 | 中国语境下纯电动微型车全生命周期碳排放
汽车节能与环保 | 中国语境下纯电动微型车全生命周期碳排放
-

汽车节能与环保 | 基于蓄热装置辅助的燃料电池电动车供暖系统动态仿真
汽车节能与环保 | 基于蓄热装置辅助的燃料电池电动车供暖系统动态仿真
-
汽车节能与环保 | 煤基燃料燃烧颗粒物对颗粒捕集器沉积过程的影响
汽车节能与环保 | 煤基燃料燃烧颗粒物对颗粒捕集器沉积过程的影响
-
汽车节能与环保 | 燃油车和纯电车混杂智能网联队列系统的节能与稳定控制
汽车节能与环保 | 燃油车和纯电车混杂智能网联队列系统的节能与稳定控制
-
汽车节能与环保 | 热辐射触发锂离子电池热失效行为及其射流热特性
汽车节能与环保 | 热辐射触发锂离子电池热失效行为及其射流热特性
-

汽车节能与环保 | 高温高负荷下Miller 发动机扭矩提升的控制策略
汽车节能与环保 | 高温高负荷下Miller 发动机扭矩提升的控制策略
-

智能驾驶与智慧交通 | 行人过街模拟及车辆右转避障路径规划方法
智能驾驶与智慧交通 | 行人过街模拟及车辆右转避障路径规划方法
-
智能驾驶与智慧交通 | 基于多胞体系统的FWID EV 鲁棒加权增益调度轨迹跟踪控制
智能驾驶与智慧交通 | 基于多胞体系统的FWID EV 鲁棒加权增益调度轨迹跟踪控制
-

智能驾驶与智慧交通 | 基于深度学习模型的疲劳驾驶行为识别算法
智能驾驶与智慧交通 | 基于深度学习模型的疲劳驾驶行为识别算法
-
智能驾驶与智慧交通 | 考虑参数估计的MPC 算法的商用车车道保持控制
智能驾驶与智慧交通 | 考虑参数估计的MPC 算法的商用车车道保持控制
-
| 《汽车安全与节能学报》撰稿要求
| 《汽车安全与节能学报》撰稿要求









 登录
登录