
目录
快速导航-
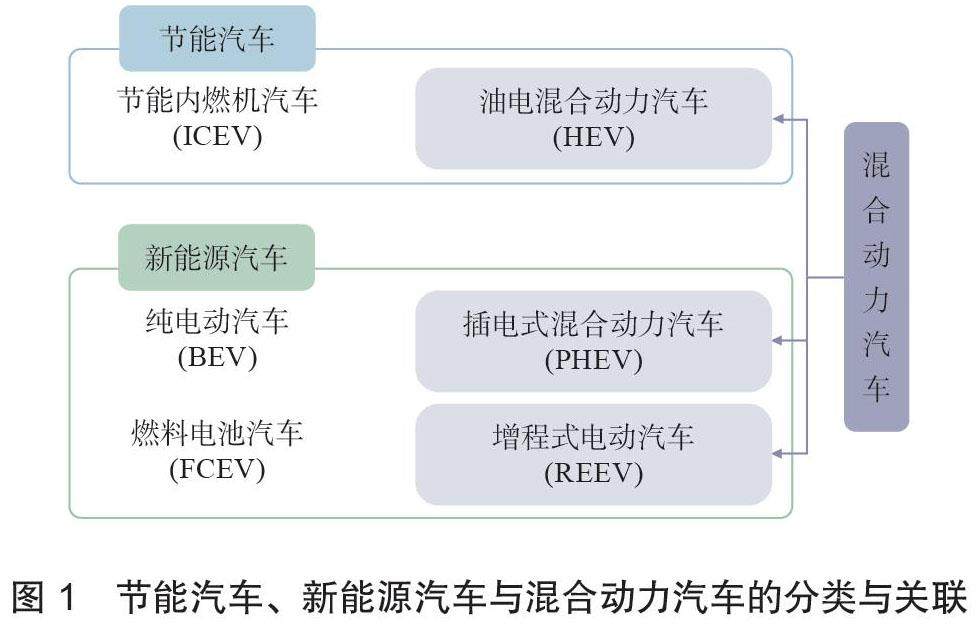
综述与展望 | 中国混合动力汽车动力总成技术进展
综述与展望 | 中国混合动力汽车动力总成技术进展
-
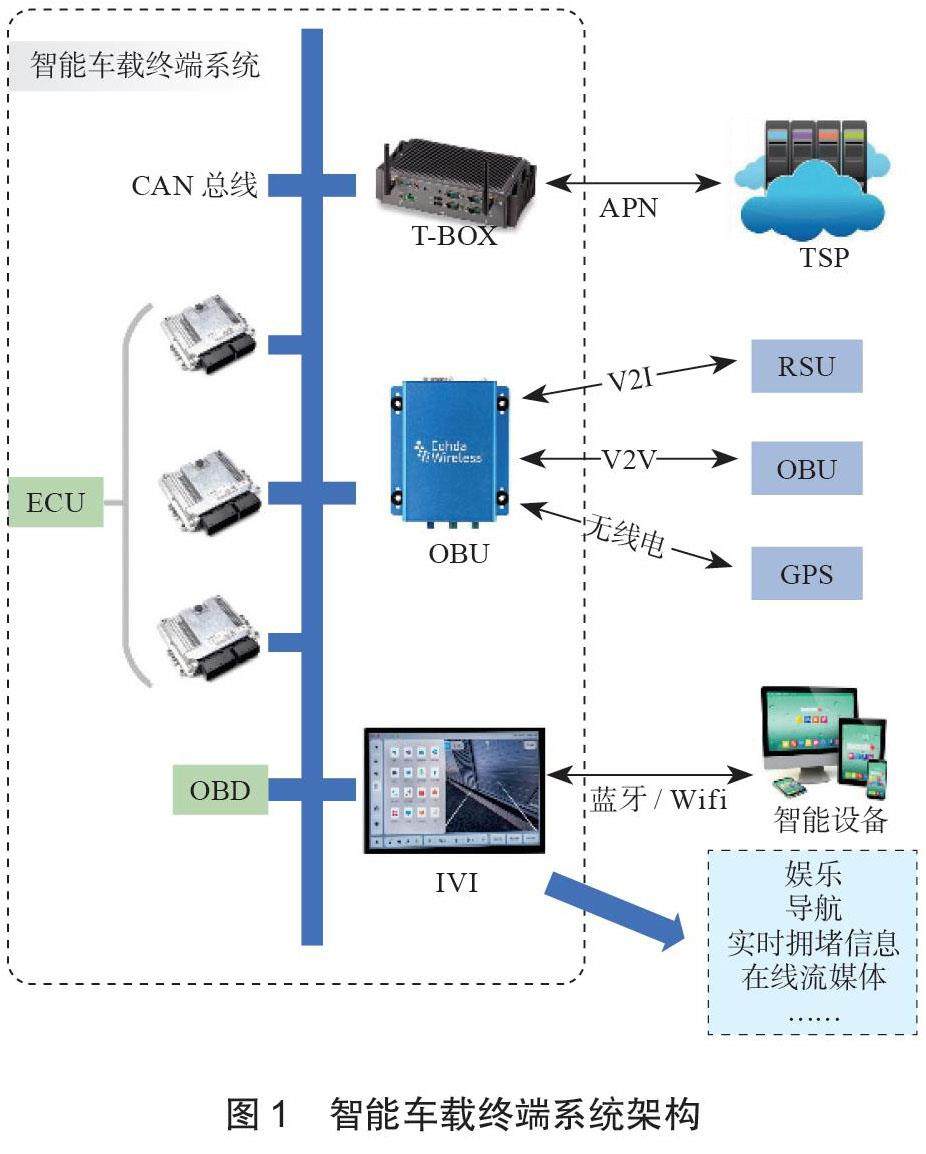
综述与展望 | 智能网联环境下车载终端的发展现状与挑战
综述与展望 | 智能网联环境下车载终端的发展现状与挑战
-
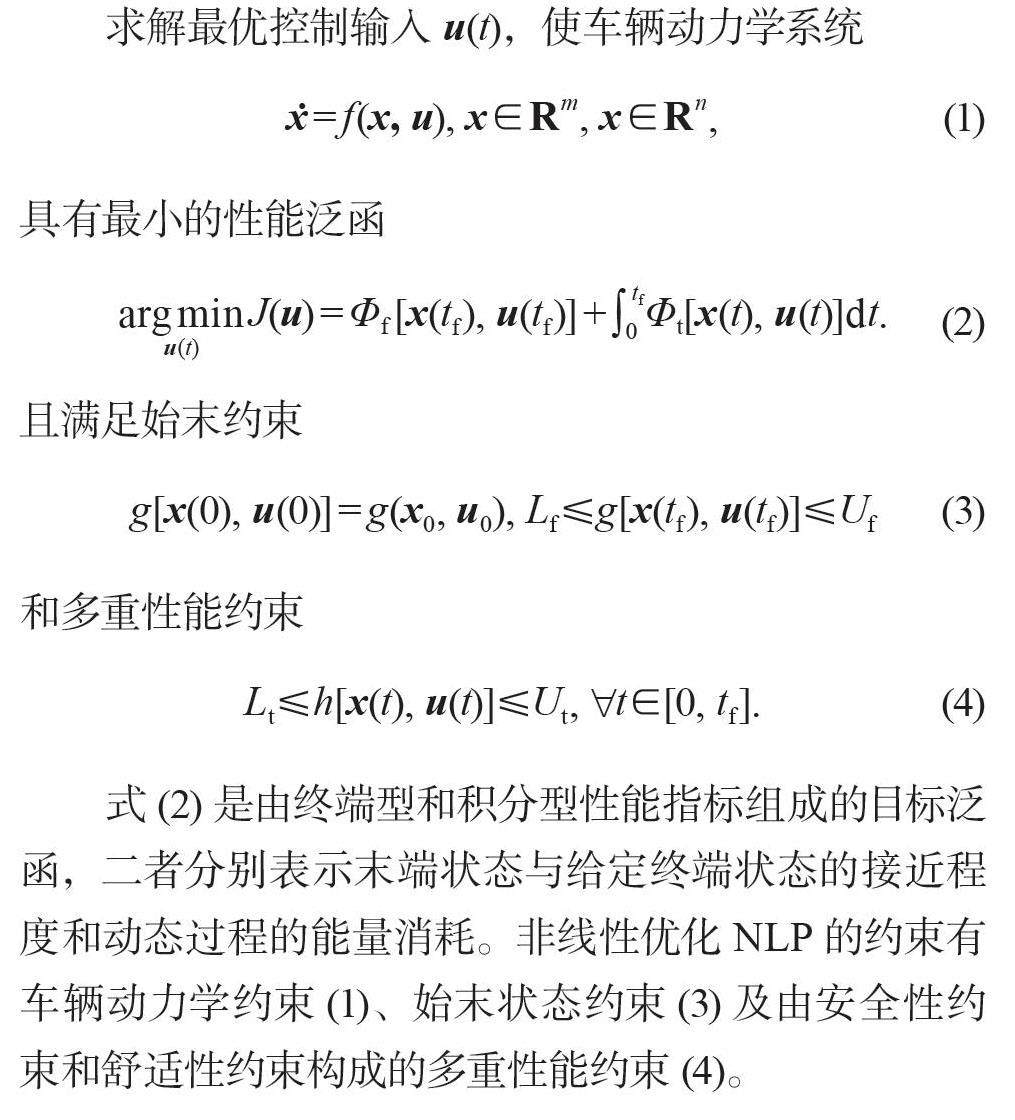
汽车安全 | 考虑经验驾驶行为的入弯实时类人速度规划方法
汽车安全 | 考虑经验驾驶行为的入弯实时类人速度规划方法
-
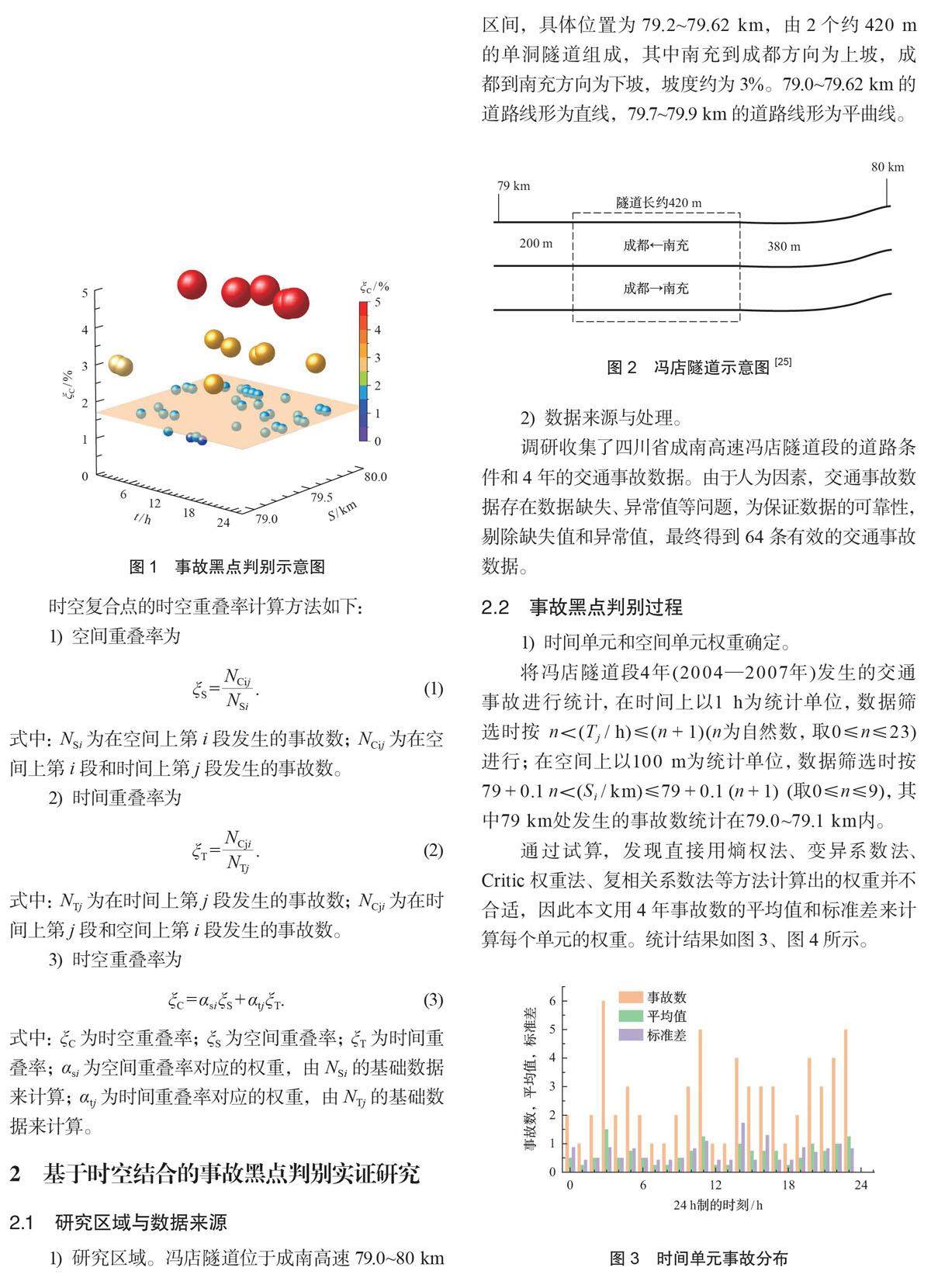
汽车安全 | 基于时空结合的道路交通事故的黑点判别方法
汽车安全 | 基于时空结合的道路交通事故的黑点判别方法
-
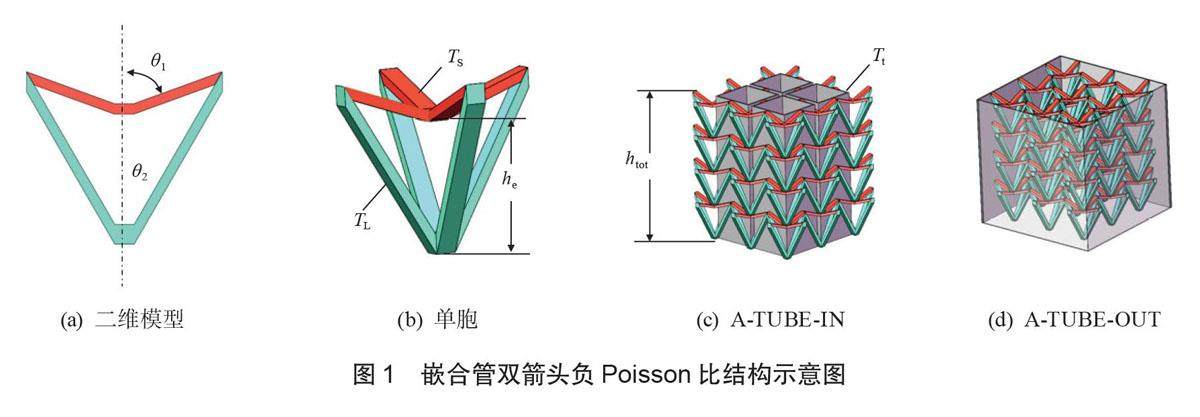
汽车安全 | 通过嵌合管来增强负Poisson比结构的耐撞性能
汽车安全 | 通过嵌合管来增强负Poisson比结构的耐撞性能
-

汽车安全 | 基于自适应自编码器假人力学响应降维和重构方法
汽车安全 | 基于自适应自编码器假人力学响应降维和重构方法
-

汽车节能与环保 | 基于特征阻抗及滑动t 方法的变电流快充析锂检测方法
汽车节能与环保 | 基于特征阻抗及滑动t 方法的变电流快充析锂检测方法
-
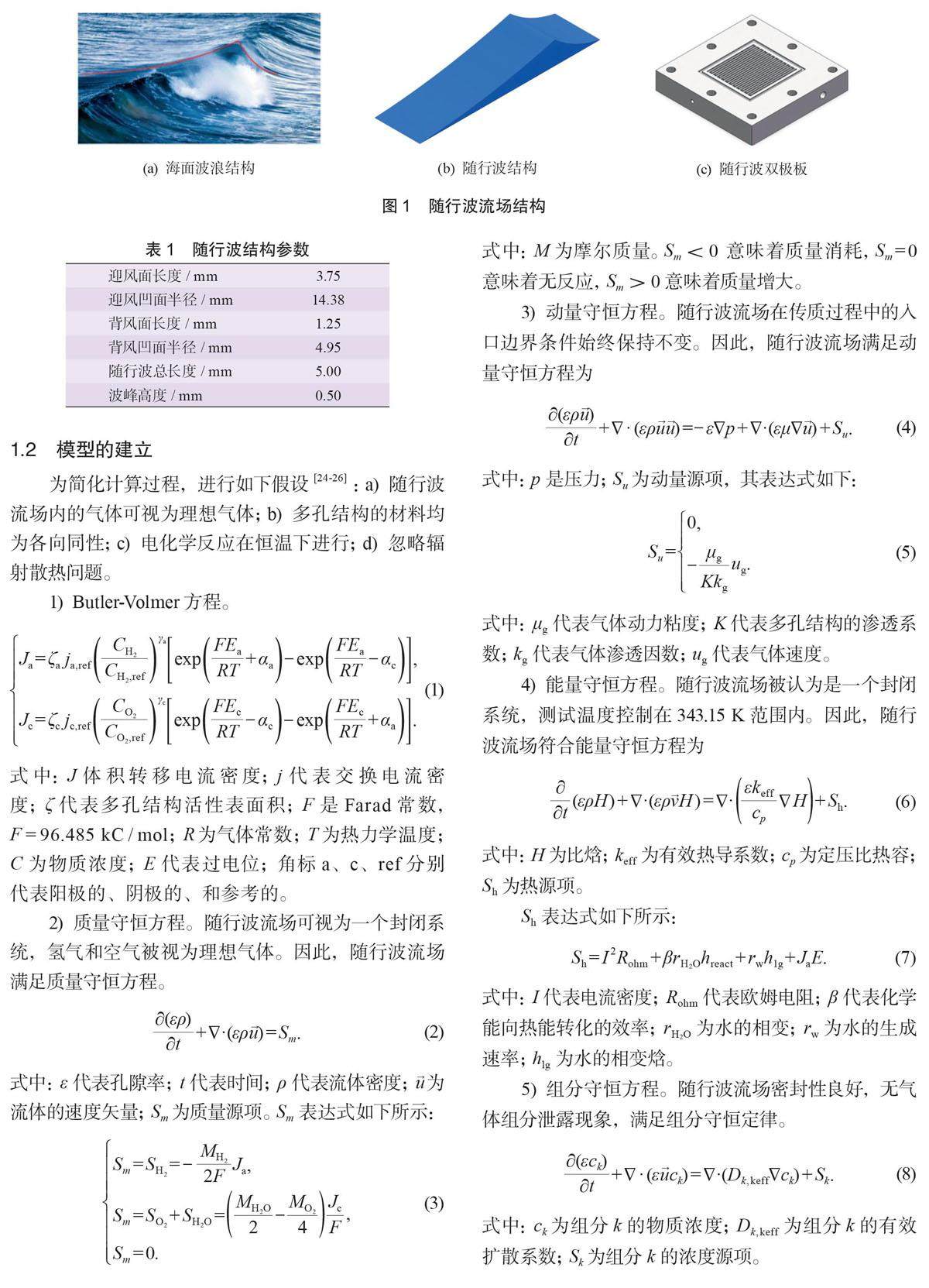
汽车节能与环保 | 质子交换膜燃料电池随行波流场设计与传质特性
汽车节能与环保 | 质子交换膜燃料电池随行波流场设计与传质特性
-

汽车节能与环保 | 闪沸喷雾孔几何形状对孔内流动特性影响的数值模拟
汽车节能与环保 | 闪沸喷雾孔几何形状对孔内流动特性影响的数值模拟
-
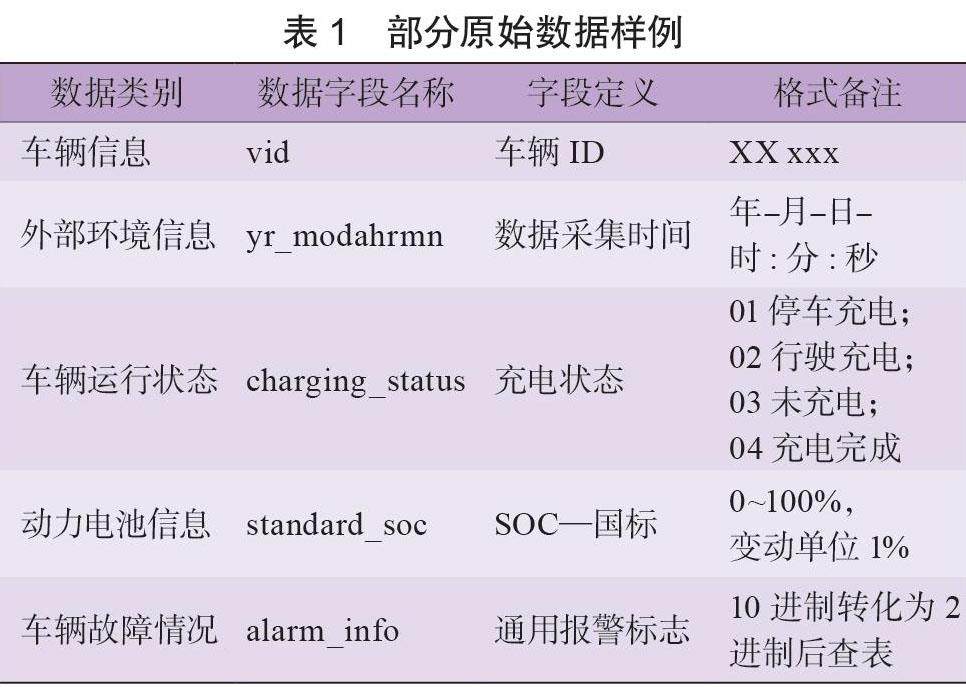
汽车节能与环保 | 基于集成学习与数据驱动的电动汽车动力电池多维度故障预警
汽车节能与环保 | 基于集成学习与数据驱动的电动汽车动力电池多维度故障预警
-
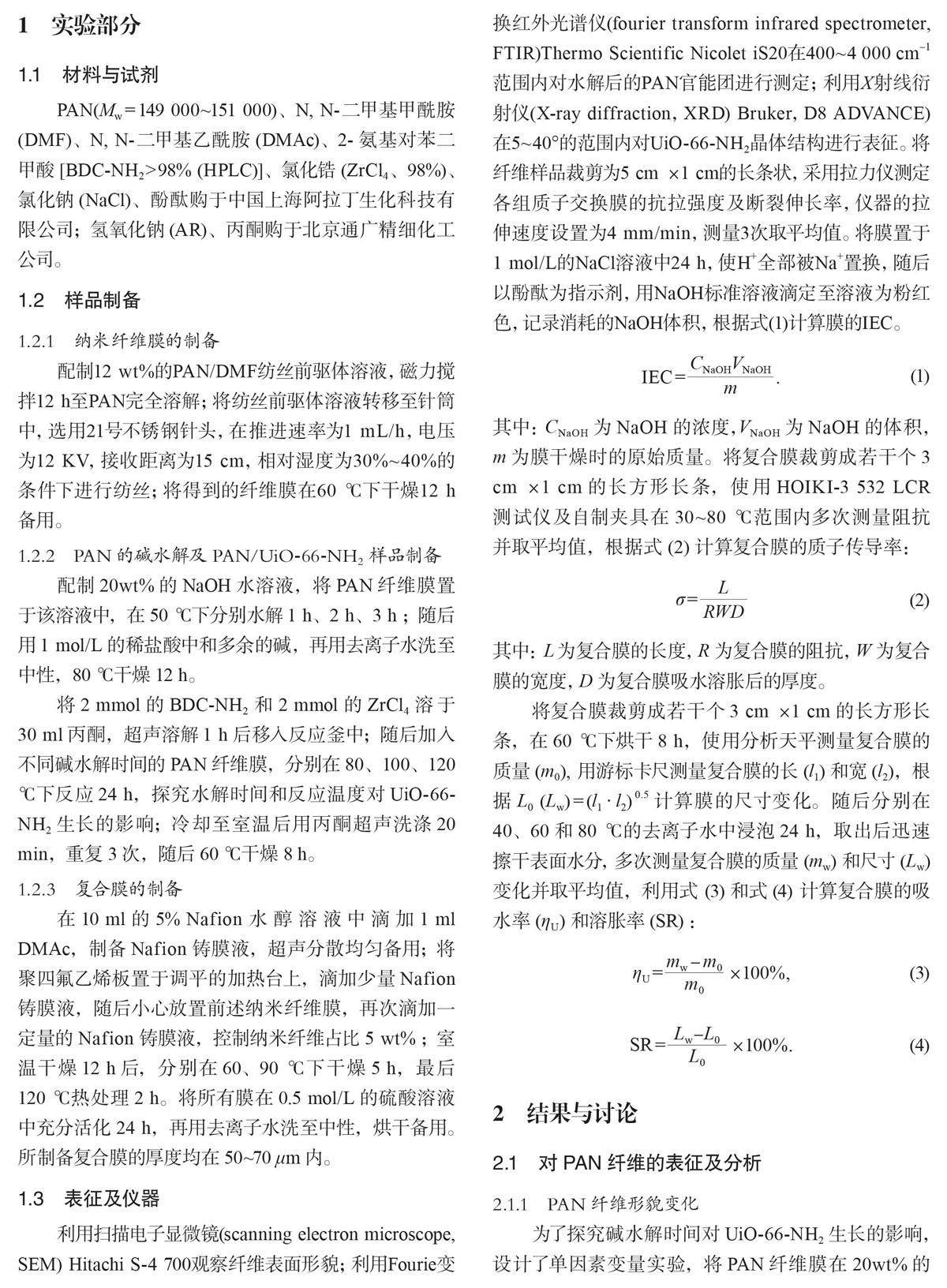
汽车节能与环保 | PAN/ UiO-66-NH2/ Nafion复合纳米纤维质子交换膜制备与性能
汽车节能与环保 | PAN/ UiO-66-NH2/ Nafion复合纳米纤维质子交换膜制备与性能
-
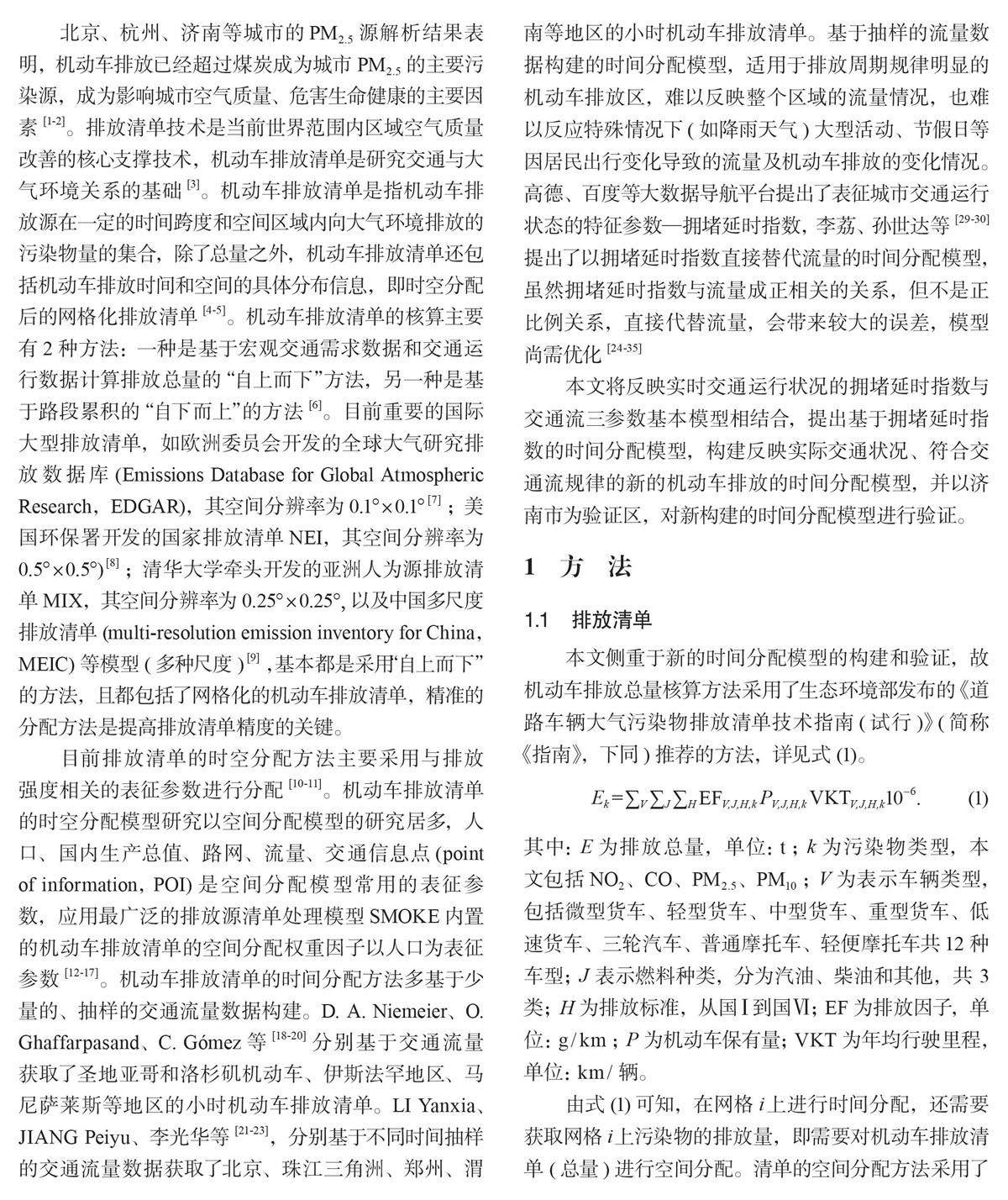
汽车节能与环保 | 一种新的机动车排放清单的时间分配方法
汽车节能与环保 | 一种新的机动车排放清单的时间分配方法
-
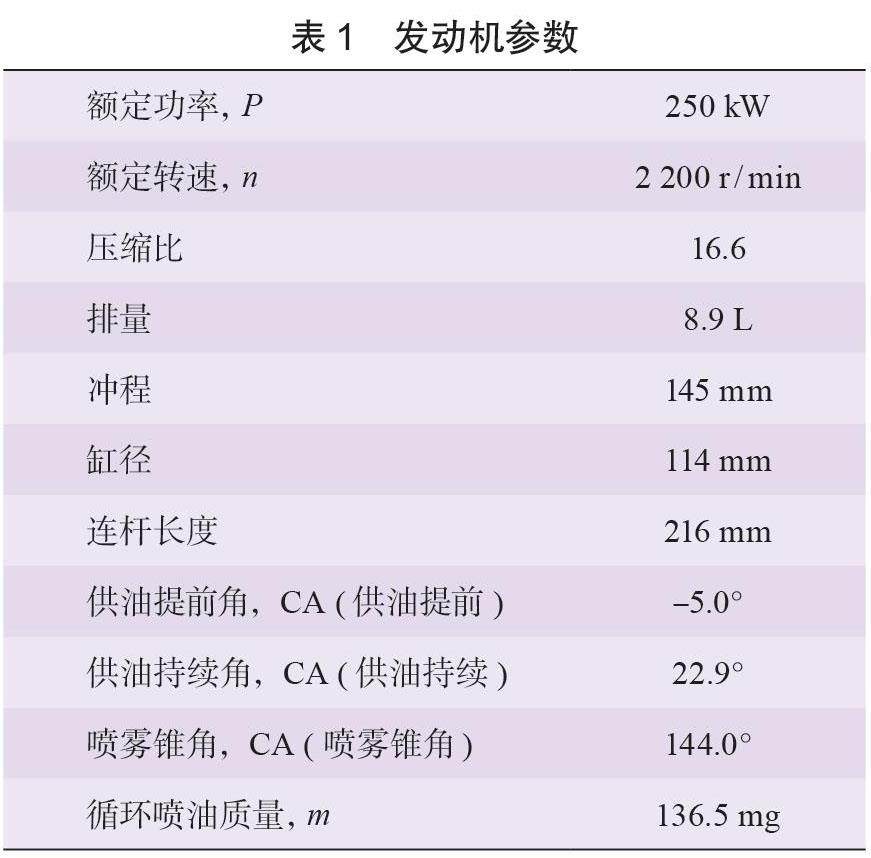
汽车节能与环保 | 氨替代率对柴油发动机的燃烧及排放性能的仿真
汽车节能与环保 | 氨替代率对柴油发动机的燃烧及排放性能的仿真
-
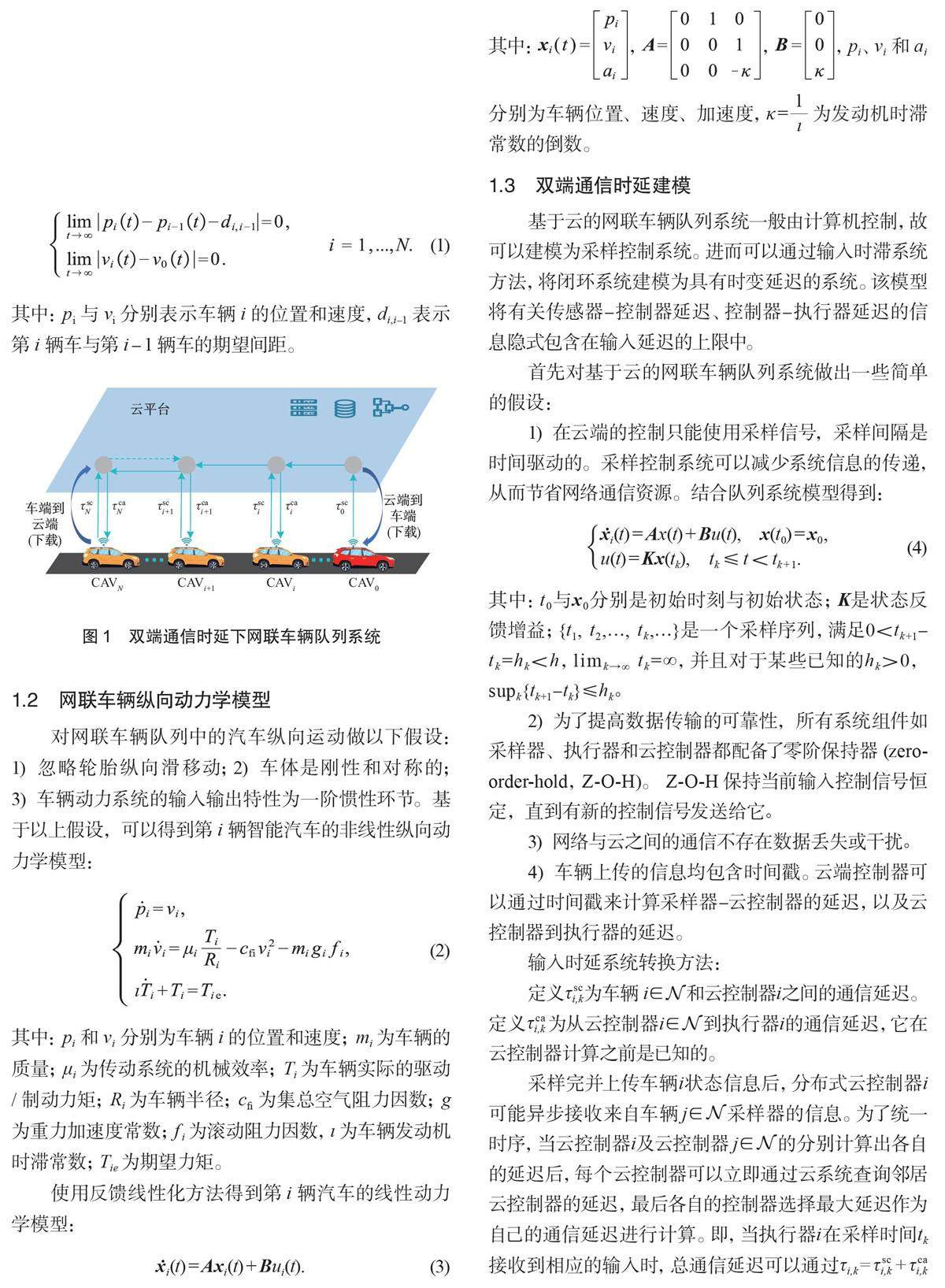
智能驾驶与智慧交通 | 双端通信时延下网联车辆纵向队列的分布式控制器设计与分析
智能驾驶与智慧交通 | 双端通信时延下网联车辆纵向队列的分布式控制器设计与分析
-
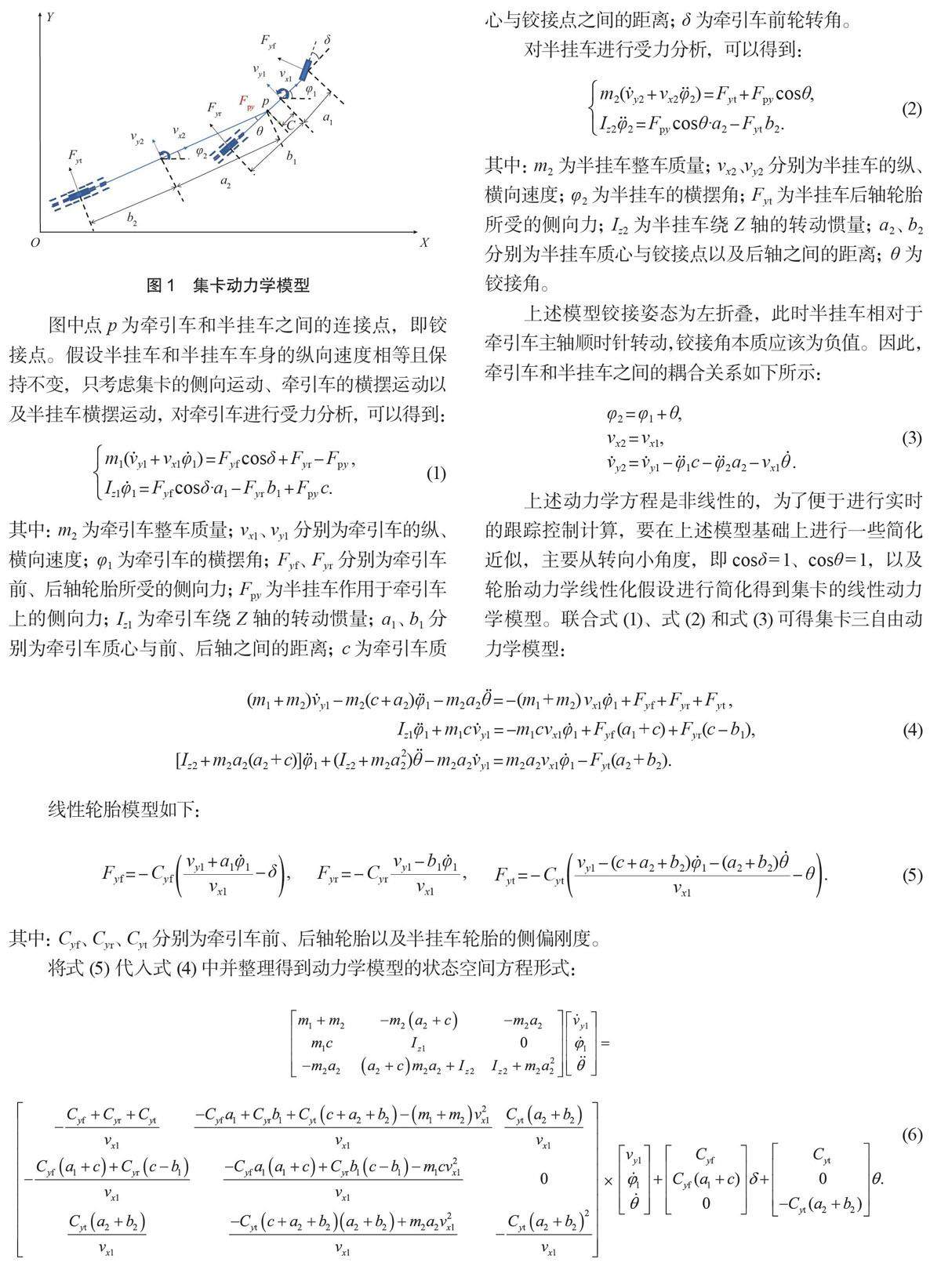
智能驾驶与智慧交通 | 采用转角补偿LQR的自动驾驶集卡路径跟踪控制
智能驾驶与智慧交通 | 采用转角补偿LQR的自动驾驶集卡路径跟踪控制
-
智能驾驶与智慧交通 | 基于车路协同技术的超高速公路虚拟轨道系统研究
智能驾驶与智慧交通 | 基于车路协同技术的超高速公路虚拟轨道系统研究
-

智能驾驶与智慧交通 | 基于MSFA-Net 的车辆及车道线检测算法
智能驾驶与智慧交通 | 基于MSFA-Net 的车辆及车道线检测算法









 登录
登录