
目录
快速导航-
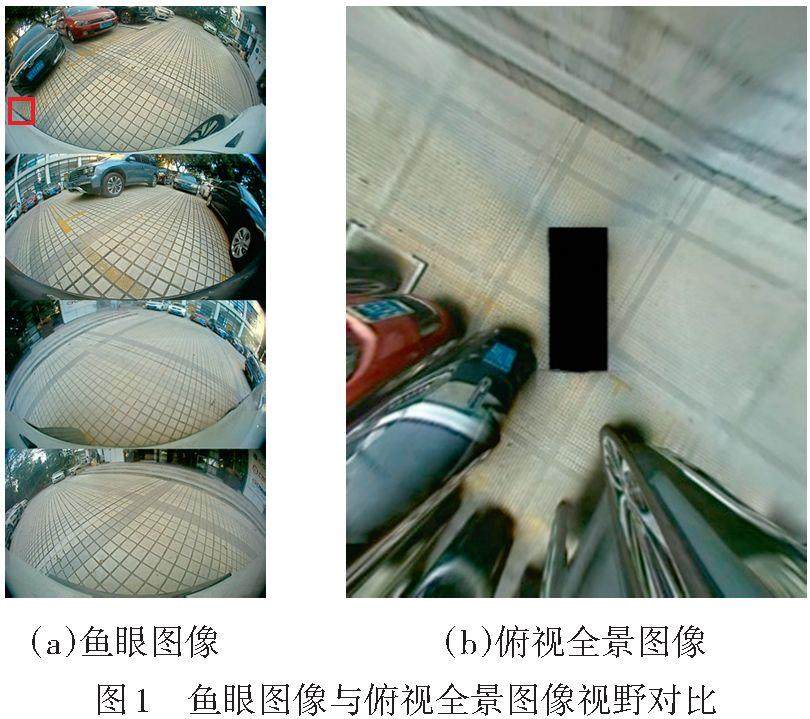
| 基于CNN-Transformer的自动泊车车位感知算法
| 基于CNN-Transformer的自动泊车车位感知算法
-
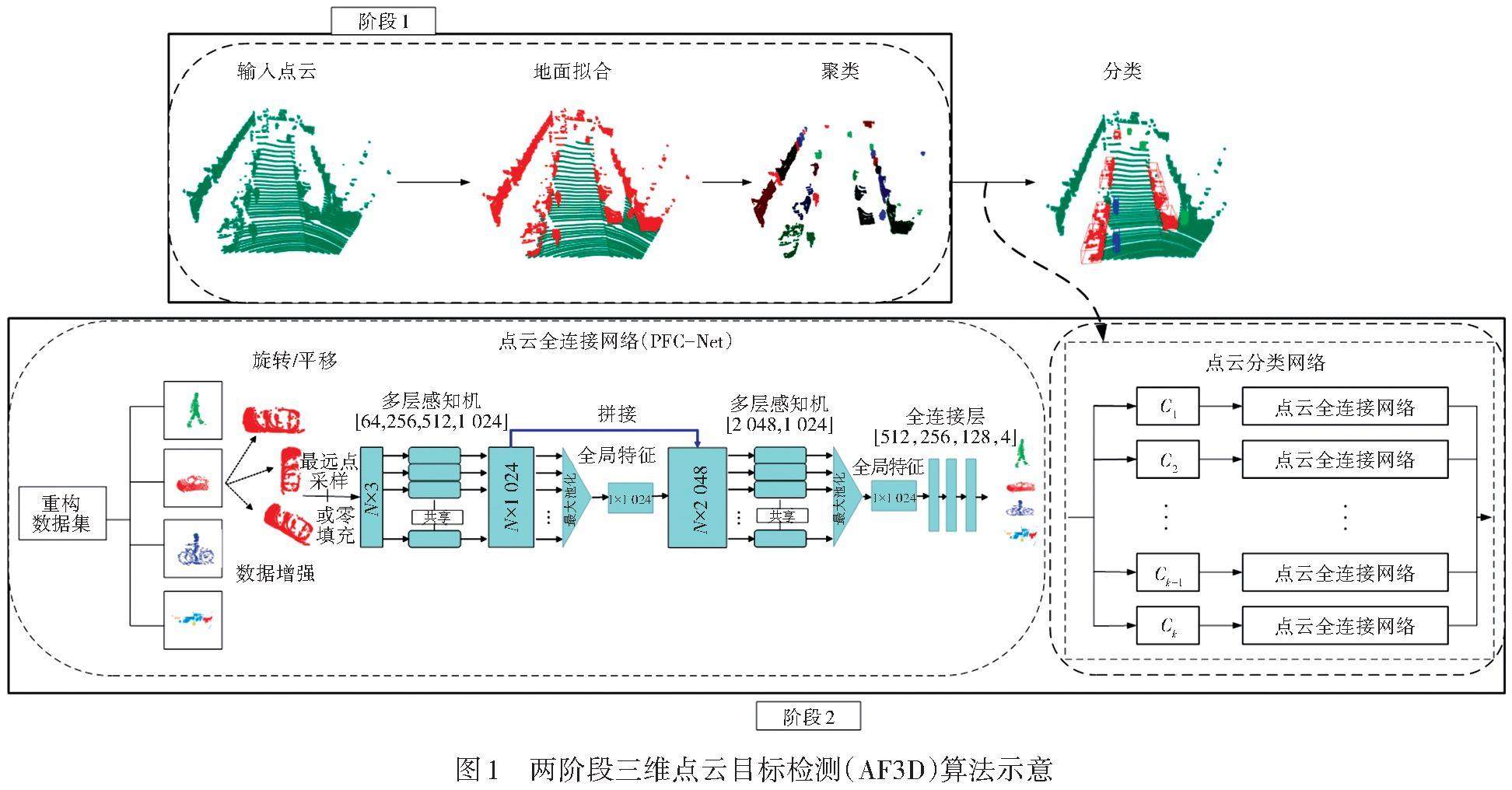
| 一种两阶段路面三维点云目标检测算法
| 一种两阶段路面三维点云目标检测算法
-
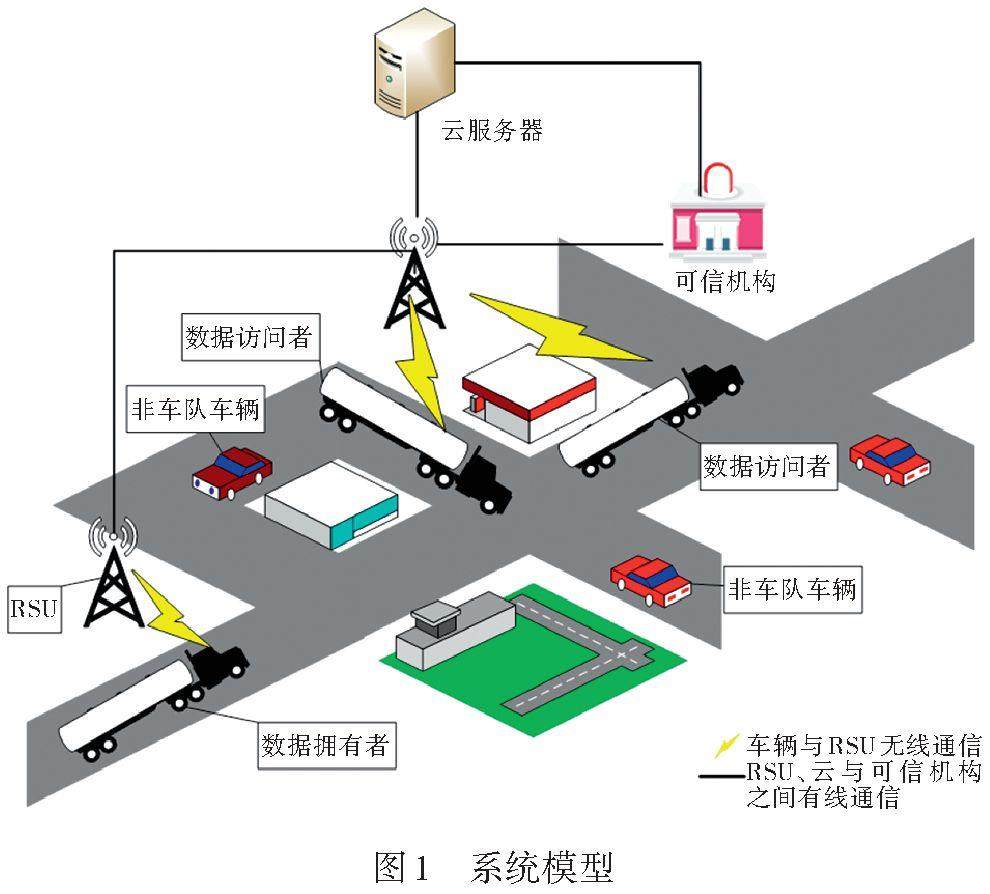
| 车载社交网中基于密文属性加密的车队车辆数据共享方案
| 车载社交网中基于密文属性加密的车队车辆数据共享方案
-

| 数据驱动的动力电池能量特性预测研究
| 数据驱动的动力电池能量特性预测研究
-
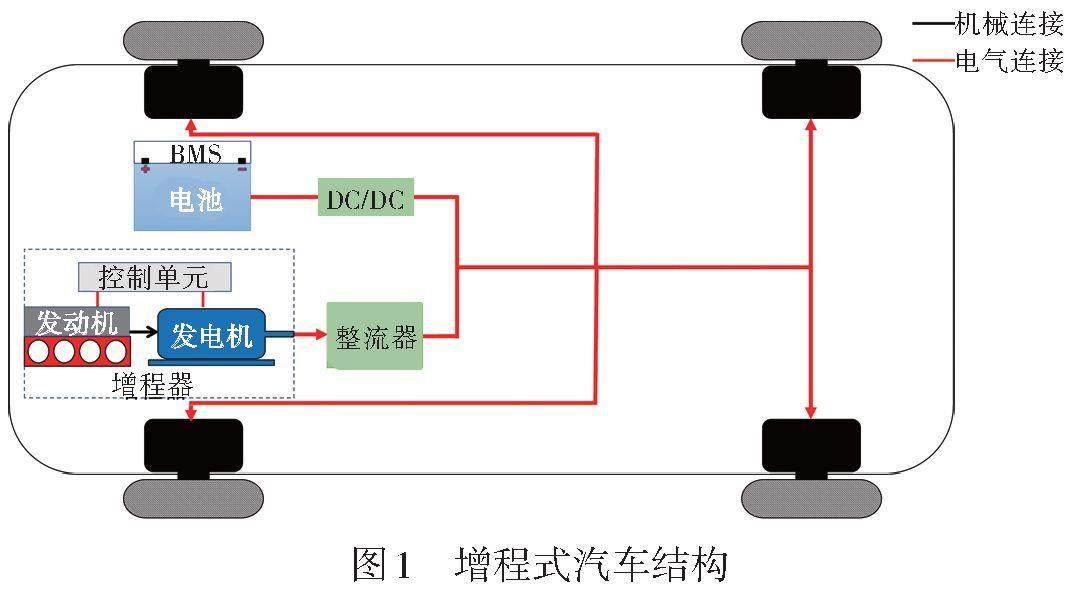
| 基于LSTM车速预测和深度确定性策略梯度的增程式电动汽车能量管理
| 基于LSTM车速预测和深度确定性策略梯度的增程式电动汽车能量管理
-
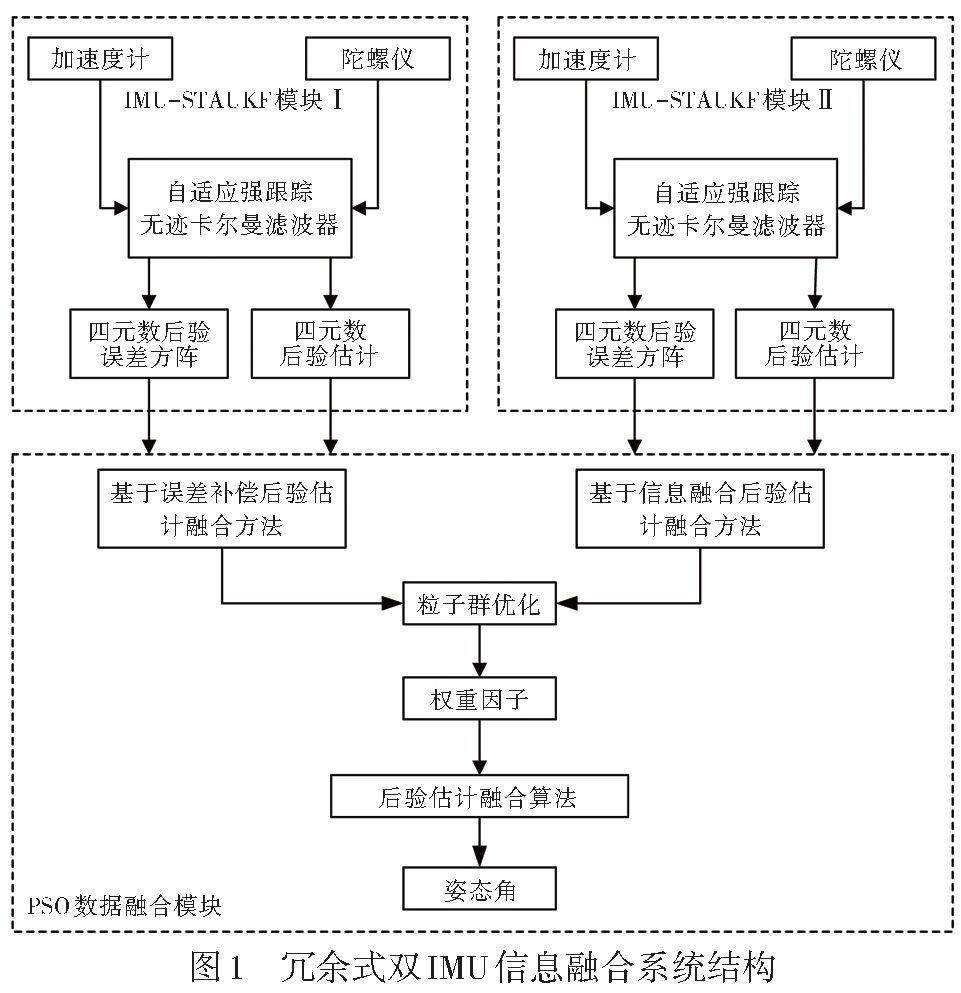
| 基于粒子群优化的无人车双惯性测量单元姿态融合方法
| 基于粒子群优化的无人车双惯性测量单元姿态融合方法
-
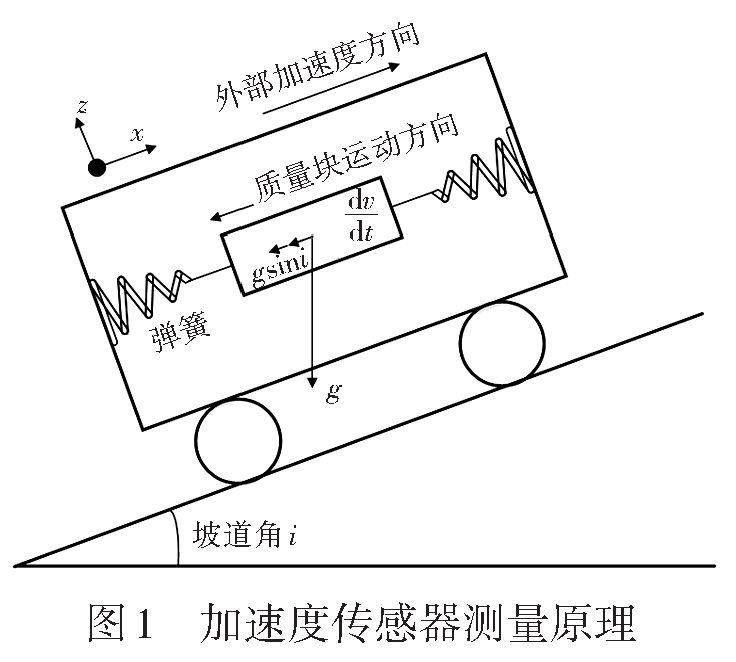
| 基于自适应调参滤波的路面坡度估计算法
| 基于自适应调参滤波的路面坡度估计算法
-
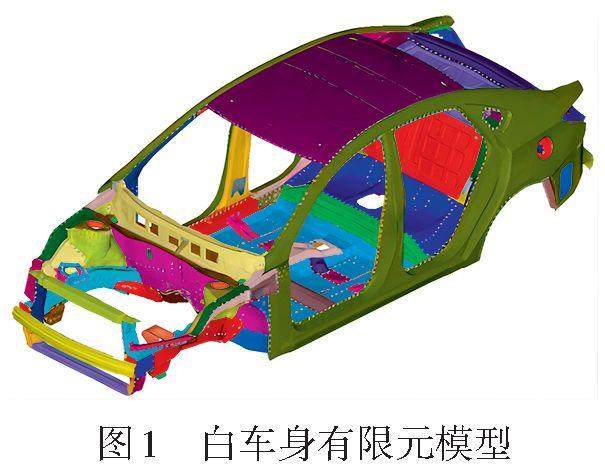
| 基于粒子群-细菌觅食混合优化算法的汽车碳纤维复合材料地板铺层设计
| 基于粒子群-细菌觅食混合优化算法的汽车碳纤维复合材料地板铺层设计













 登录
登录