
目录
快速导航-
综述与展望 | 欧洲汽车动力系统多元化的发展趋势和展望
综述与展望 | 欧洲汽车动力系统多元化的发展趋势和展望
-
汽车安全 | 基于中国汽车-行人事故数据的老龄人与青壮年行人损伤特征对比分析
汽车安全 | 基于中国汽车-行人事故数据的老龄人与青壮年行人损伤特征对比分析
-

汽车安全 | 面向新法规的的卡车驾驶室顶压性能提升
汽车安全 | 面向新法规的的卡车驾驶室顶压性能提升
-
汽车安全 | 在侧面碰撞中电动汽车电池模块破损的预测
汽车安全 | 在侧面碰撞中电动汽车电池模块破损的预测
-

汽车安全 | 基于交通事故重建的行人过街安全岛高度设计
汽车安全 | 基于交通事故重建的行人过街安全岛高度设计
-

汽车安全 | 24 Model 在道路运输事故成因中的应用
汽车安全 | 24 Model 在道路运输事故成因中的应用
-

汽车节能与环保 | 基于钴酸锂/ 镍酸锂体系的18650 锂离子电池针刺滥用热失控颗粒喷发物特性
汽车节能与环保 | 基于钴酸锂/ 镍酸锂体系的18650 锂离子电池针刺滥用热失控颗粒喷发物特性
-

汽车节能与环保 | 锂电池与燃料电池混合观光车动力系统的优化设计
汽车节能与环保 | 锂电池与燃料电池混合观光车动力系统的优化设计
-
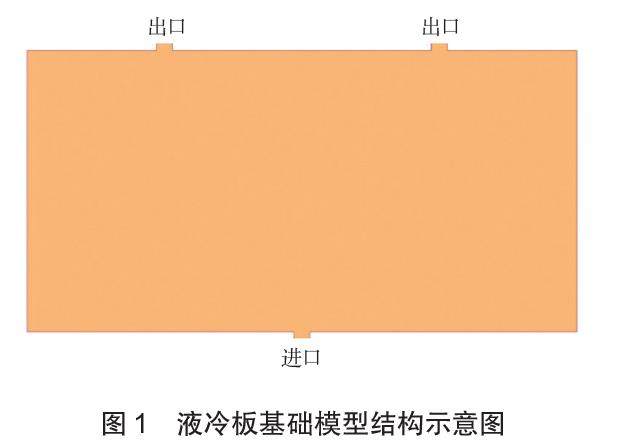
汽车节能与环保 | 水轮型翅片组耦合均温板的多目标及拓扑优化
汽车节能与环保 | 水轮型翅片组耦合均温板的多目标及拓扑优化
-

汽车节能与环保 | 21700 锂离子电池在不同SOC下的热失控实验研究
汽车节能与环保 | 21700 锂离子电池在不同SOC下的热失控实验研究
-

汽车节能与环保 | 二硝酰胺铵液滴微爆特性的试验研究
汽车节能与环保 | 二硝酰胺铵液滴微爆特性的试验研究
-

智能驾驶与智慧交通 | 基于DMPC的无信控交叉口智能网联车辆多车协同轨迹规划
智能驾驶与智慧交通 | 基于DMPC的无信控交叉口智能网联车辆多车协同轨迹规划
-

智能驾驶与智慧交通 | 基于KL 散度工况识别的混合动力汽车队列的分层控制
智能驾驶与智慧交通 | 基于KL 散度工况识别的混合动力汽车队列的分层控制
-
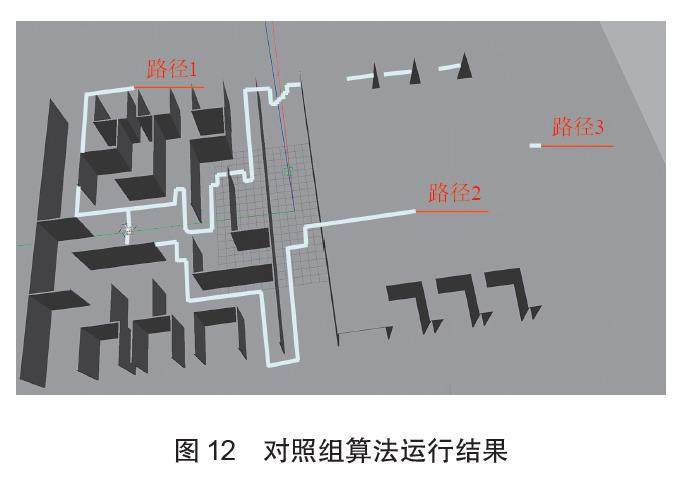
智能驾驶与智慧交通 | 基于图搜索的陆空两栖平台3D 路径规划算法
智能驾驶与智慧交通 | 基于图搜索的陆空两栖平台3D 路径规划算法
-
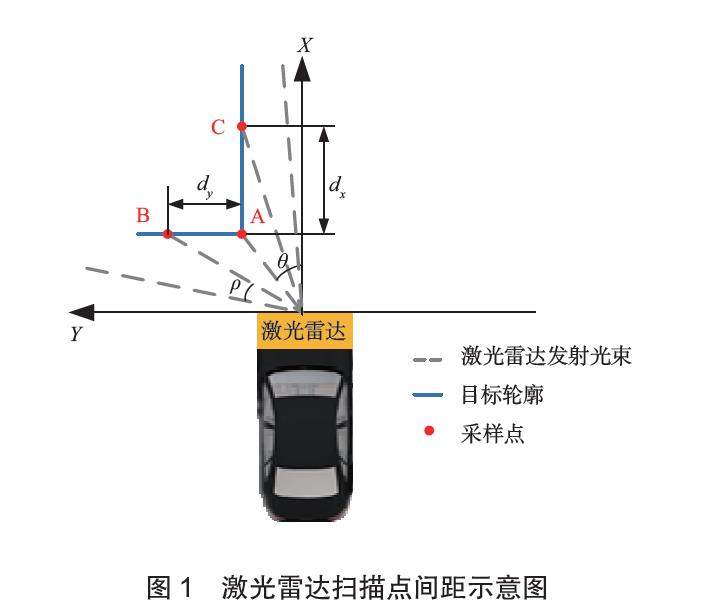
智能驾驶与智慧交通 | 一种基于目标点云分布特性的动态聚类算法
智能驾驶与智慧交通 | 一种基于目标点云分布特性的动态聚类算法









 登录
登录