

目录
快速导航-

理论研究 | 片式离合器摩擦副热弹性不稳定性温度-压力扰动特性研究
理论研究 | 片式离合器摩擦副热弹性不稳定性温度-压力扰动特性研究
-
理论研究 | 基于多截面构造的实测误差齿轮啮合性能分析
理论研究 | 基于多截面构造的实测误差齿轮啮合性能分析
-
理论研究 | 行星轮滚针轴承组件变形和接触性能研究
理论研究 | 行星轮滚针轴承组件变形和接触性能研究
-
理论研究 | 3-[P(RR-RRR)SR]运动学冗余并联机构动力学分析
理论研究 | 3-[P(RR-RRR)SR]运动学冗余并联机构动力学分析
-
理论研究 | 弹流状态下深沟球轴承刚度阻尼研究
理论研究 | 弹流状态下深沟球轴承刚度阻尼研究
-

理论研究 | 残余应力对斜齿轮时变啮合刚度的影响及其动力学分析
理论研究 | 残余应力对斜齿轮时变啮合刚度的影响及其动力学分析
-
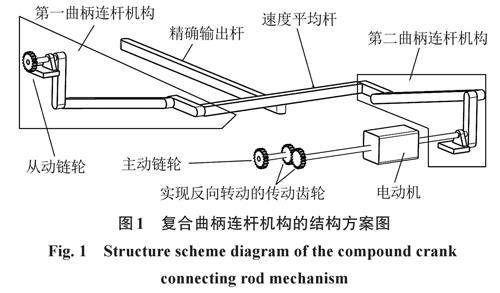
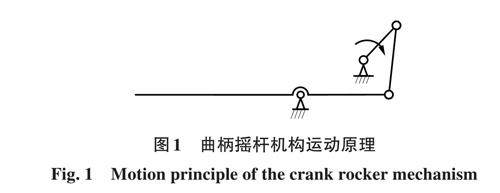
设计计算 | 具有瞬态高精度正弦输出特性组合曲柄连杆机构的研究
设计计算 | 具有瞬态高精度正弦输出特性组合曲柄连杆机构的研究
-
设计计算 | 基于中医推拿手法的柔性拍打装置设计
设计计算 | 基于中医推拿手法的柔性拍打装置设计
-
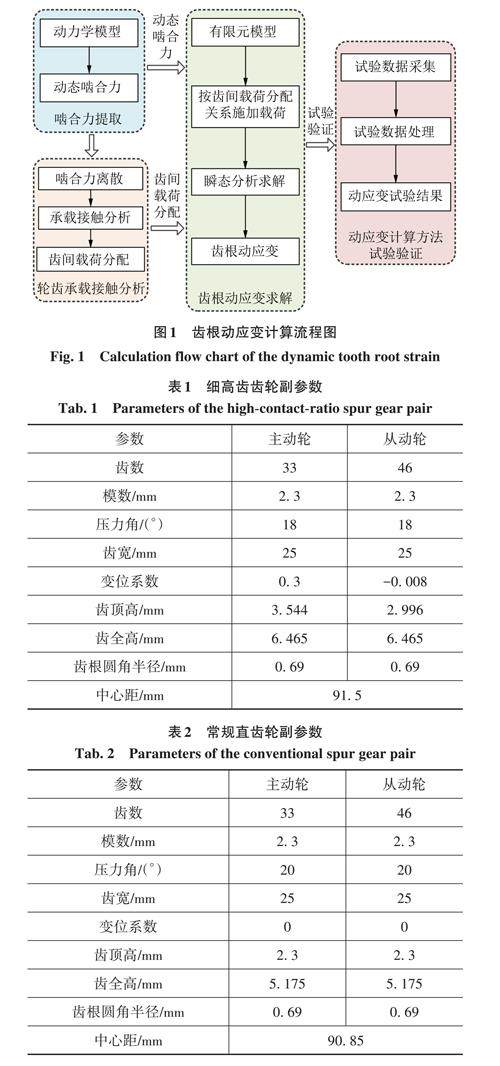
设计计算 | 细高齿齿轮齿根动应变计算及测试方法研究
设计计算 | 细高齿齿轮齿根动应变计算及测试方法研究
-

设计计算 | 超声引导的股静脉穿刺机器人的设计和验证
设计计算 | 超声引导的股静脉穿刺机器人的设计和验证
-
设计计算 | 装配误差和齿面摩擦影响下直齿轮啮合刚度建模与动力学响应分析
设计计算 | 装配误差和齿面摩擦影响下直齿轮啮合刚度建模与动力学响应分析
-

试验分析 | 基于振动特性分析的高速干切滚齿工艺参数优化研究
试验分析 | 基于振动特性分析的高速干切滚齿工艺参数优化研究
-

试验分析 | 基于热应力分布的制动盘制动力模型研究
试验分析 | 基于热应力分布的制动盘制动力模型研究
-

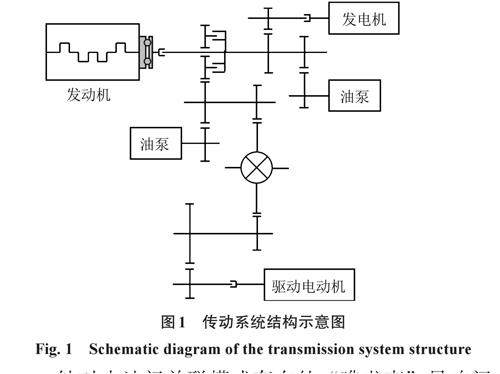
试验分析 | 不同动力源激励下P2构型混动汽车动力传动系统动态特性分析
试验分析 | 不同动力源激励下P2构型混动汽车动力传动系统动态特性分析
-
试验分析 | 混动汽车并联模式敲击异响分析及优化
试验分析 | 混动汽车并联模式敲击异响分析及优化
-

开发应用 | 弹簧滑块式弹跳机器人设计与弹跳性能研究
开发应用 | 弹簧滑块式弹跳机器人设计与弹跳性能研究
-
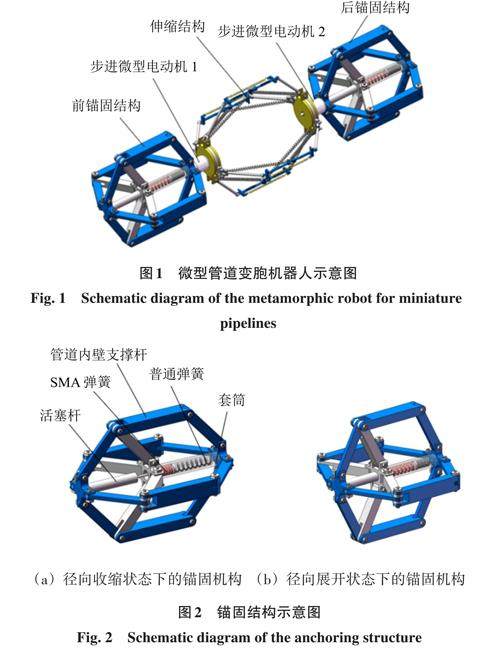
开发应用 | 一种适用于刚性微型管道的变胞机器人
开发应用 | 一种适用于刚性微型管道的变胞机器人
-

开发应用 | 不确定扰动下的气动肌肉膝关节轨迹跟踪控制
开发应用 | 不确定扰动下的气动肌肉膝关节轨迹跟踪控制
-
开发应用 | 基于三维点云的多指机械手抓取应用研究
开发应用 | 基于三维点云的多指机械手抓取应用研究
-

开发应用 | 新型混合驱动智能仿人手设计
开发应用 | 新型混合驱动智能仿人手设计
-
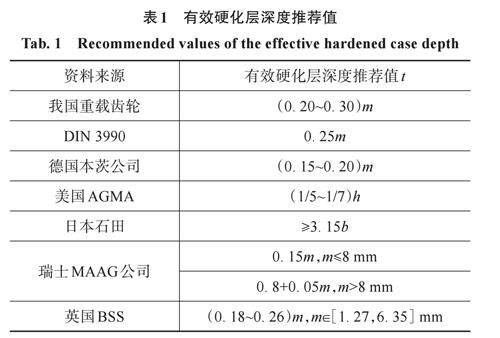
综述 | 基于失效模式的齿轮有效硬化层深选择
综述 | 基于失效模式的齿轮有效硬化层深选择
-

综述 | 爬壁机器人吸附方式机理及其应用
综述 | 爬壁机器人吸附方式机理及其应用




















 登录
登录