
目录
快速导航-
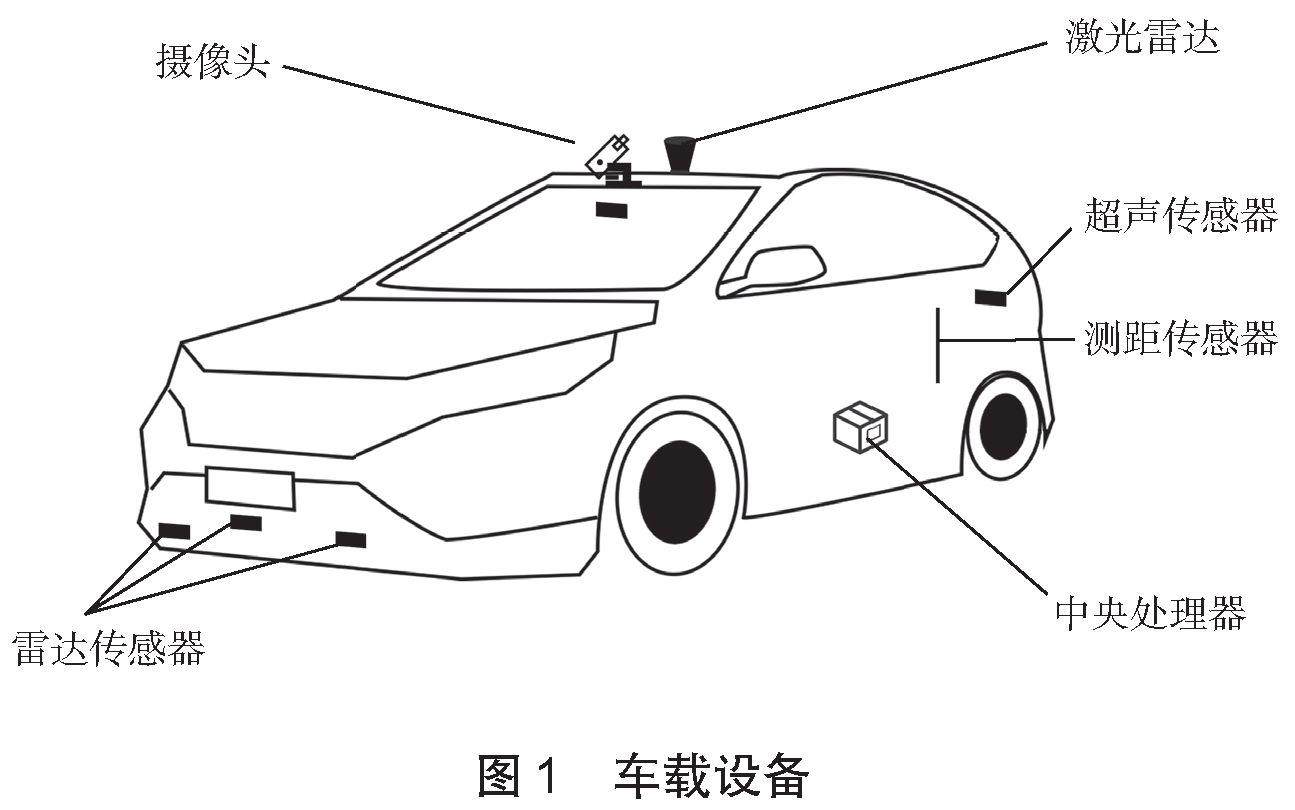
综述与展望 | 自动驾驶技术的未来 :单车智能和智能车路协同
综述与展望 | 自动驾驶技术的未来 :单车智能和智能车路协同
-
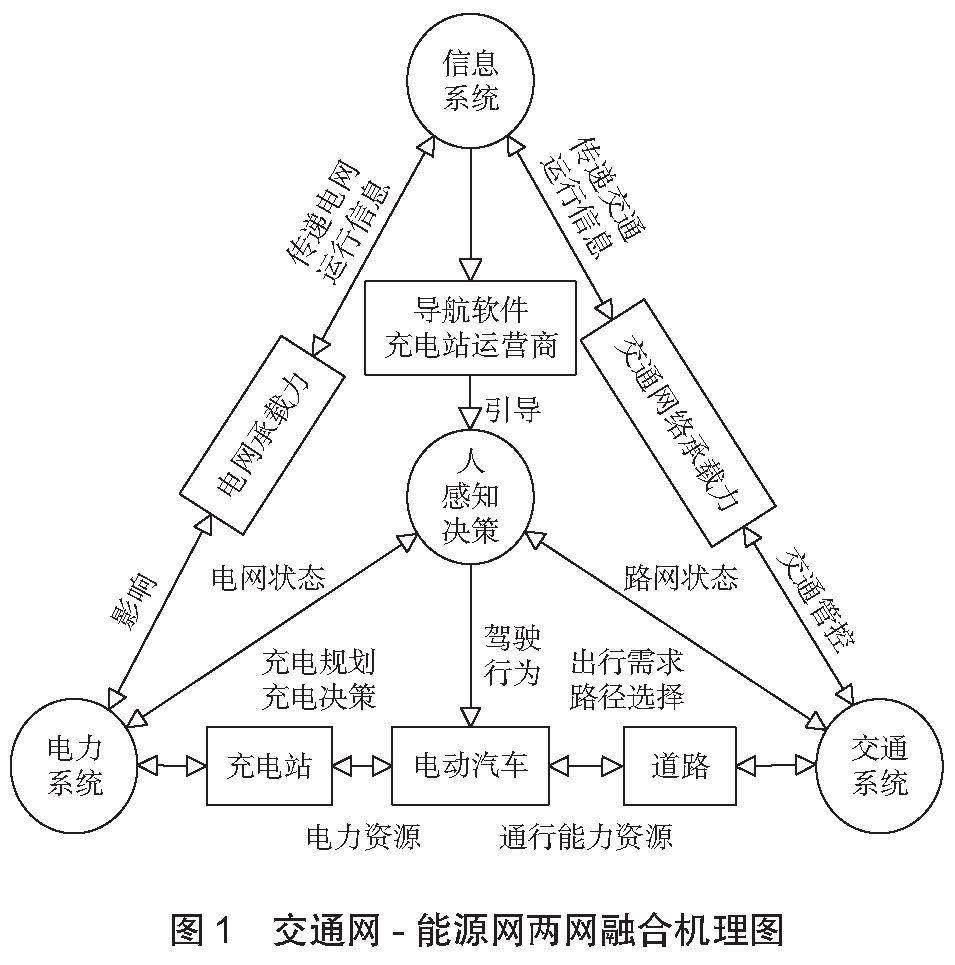
综述与展望 | 交通网络和电力网络融合承载力的研究综述
综述与展望 | 交通网络和电力网络融合承载力的研究综述
-
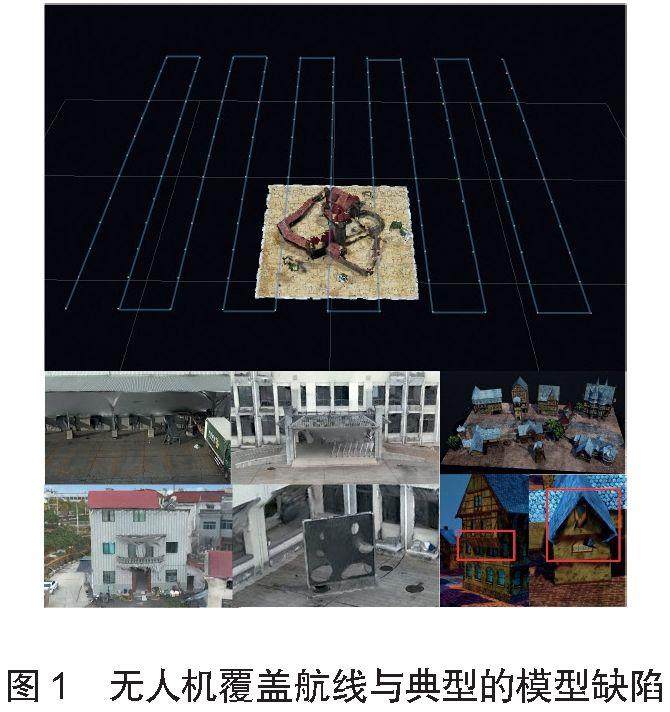
智能驾驶与智慧交通 | 基于无人地面车辆补充采集的三维重构模型优化
智能驾驶与智慧交通 | 基于无人地面车辆补充采集的三维重构模型优化
-
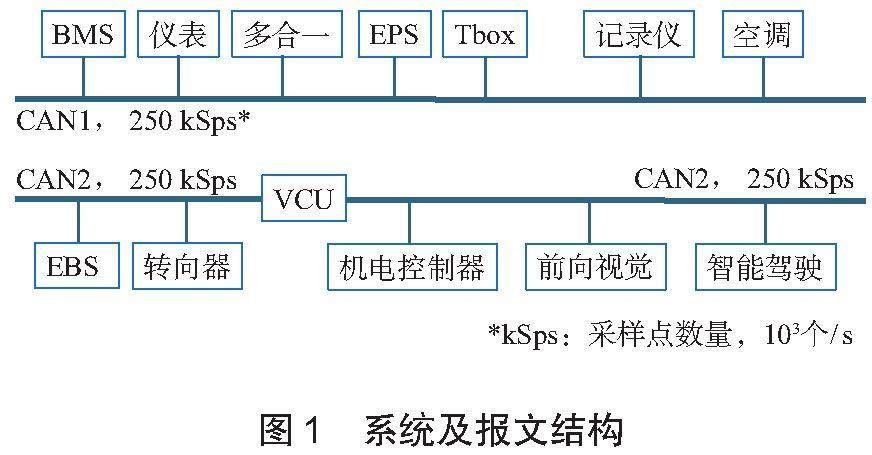
智能驾驶与智慧交通 | 基于改进GAN的智能网联车CAN总线异常检测研究
智能驾驶与智慧交通 | 基于改进GAN的智能网联车CAN总线异常检测研究
-
智能驾驶与智慧交通 | 基于固定机巢的输变配无人机智能巡检方法
智能驾驶与智慧交通 | 基于固定机巢的输变配无人机智能巡检方法
-
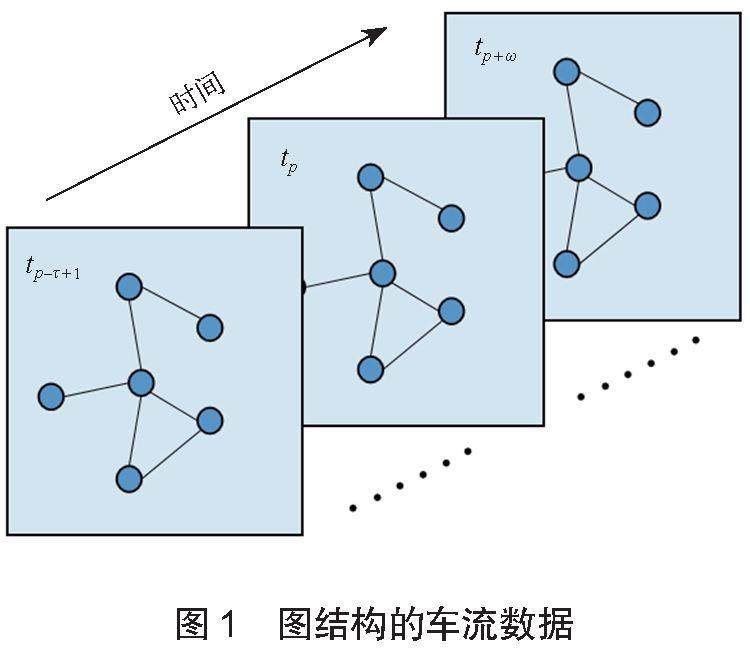
智能驾驶与智慧交通 | 基于动态图自注意力的车流参数预测方法
智能驾驶与智慧交通 | 基于动态图自注意力的车流参数预测方法
-
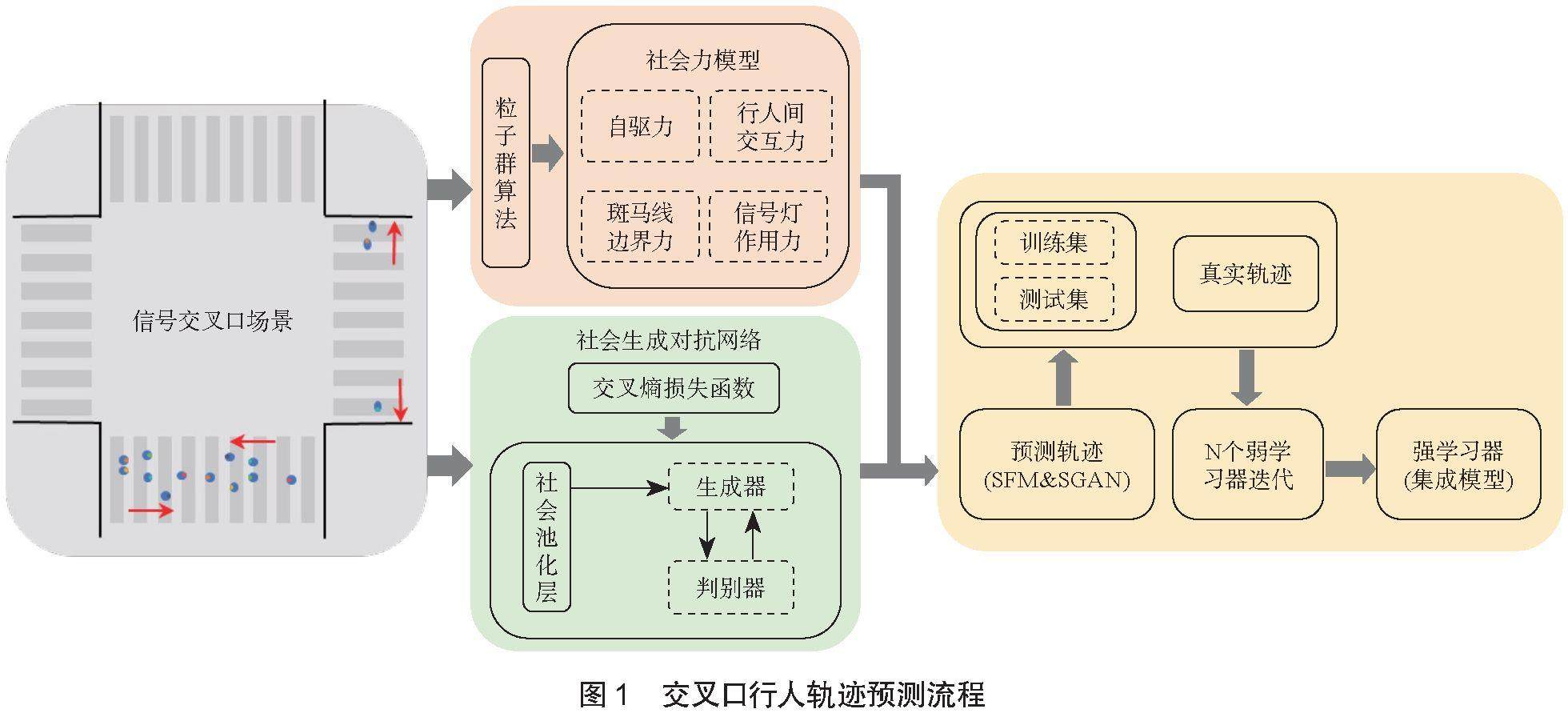
智能驾驶与智慧交通 | 面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法
智能驾驶与智慧交通 | 面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法
-
智能驾驶与智慧交通 | 基于深度强化学习CLPER-DDPG的车辆纵向速度规划
智能驾驶与智慧交通 | 基于深度强化学习CLPER-DDPG的车辆纵向速度规划
-
智能驾驶与智慧交通 | 公交-合乘车道优化设计的多目标双层规划模型
智能驾驶与智慧交通 | 公交-合乘车道优化设计的多目标双层规划模型
-
智能驾驶与智慧交通 | 基于机器学习的网约车拼车需求预测研究
智能驾驶与智慧交通 | 基于机器学习的网约车拼车需求预测研究
-
智能驾驶与智慧交通 | 基于 3DSSD 的差异路口自适应联邦学习算法
智能驾驶与智慧交通 | 基于 3DSSD 的差异路口自适应联邦学习算法
-
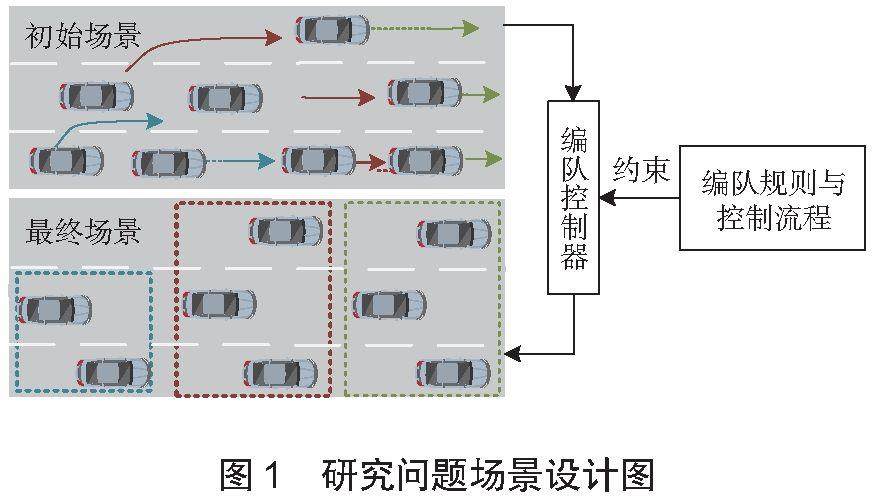
智能驾驶与智慧交通 | 基于多智能体一致性的多车道车辆集群编队控制
智能驾驶与智慧交通 | 基于多智能体一致性的多车道车辆集群编队控制
-
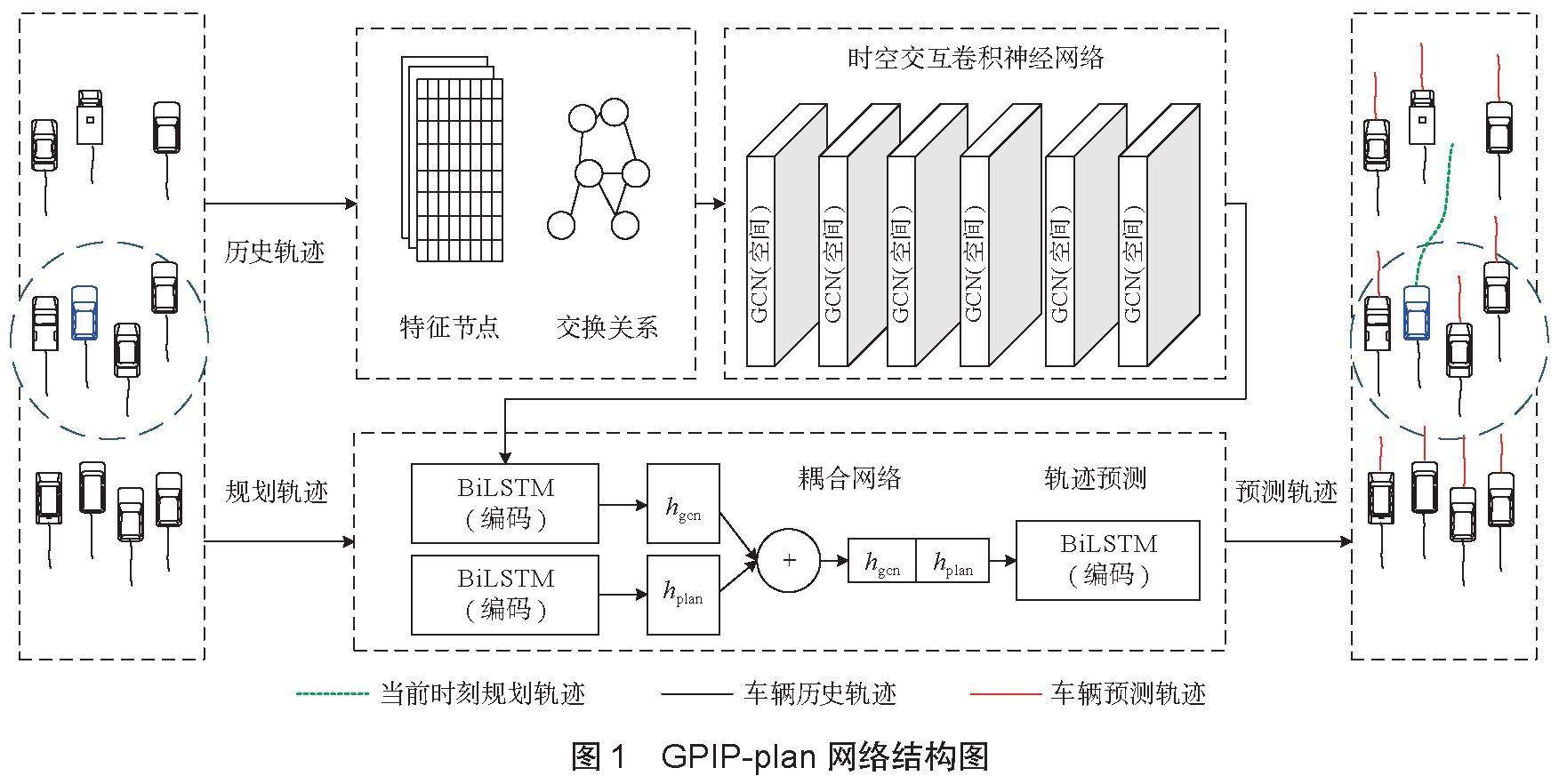
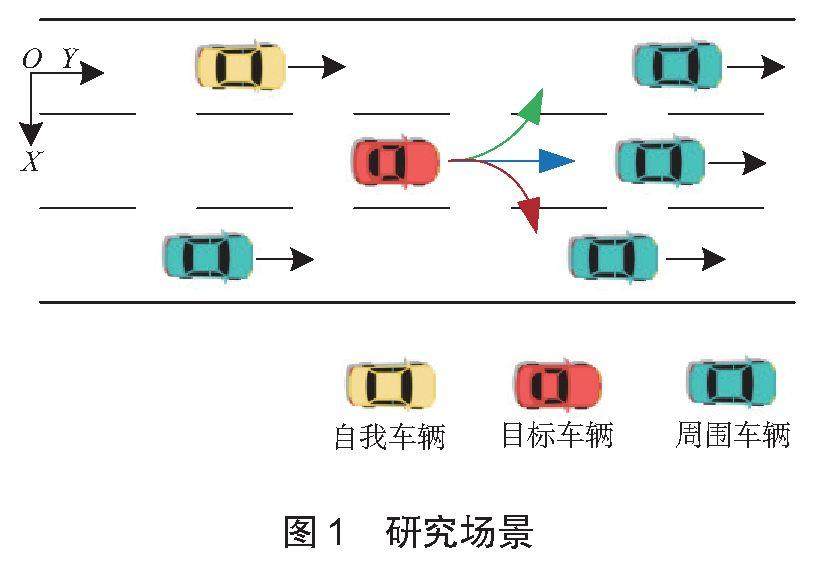
智能驾驶与智慧交通 | 基于周边车辆轨迹预测的智能汽车路径规划
智能驾驶与智慧交通 | 基于周边车辆轨迹预测的智能汽车路径规划
-
智能驾驶与智慧交通 | 基于LSTM-多头混合注意力的可解释换道意图预测
智能驾驶与智慧交通 | 基于LSTM-多头混合注意力的可解释换道意图预测
-
智能驾驶与智慧交通 | 交通规则强约束下瞬态行车风险矢量建模方法研究
智能驾驶与智慧交通 | 交通规则强约束下瞬态行车风险矢量建模方法研究
-
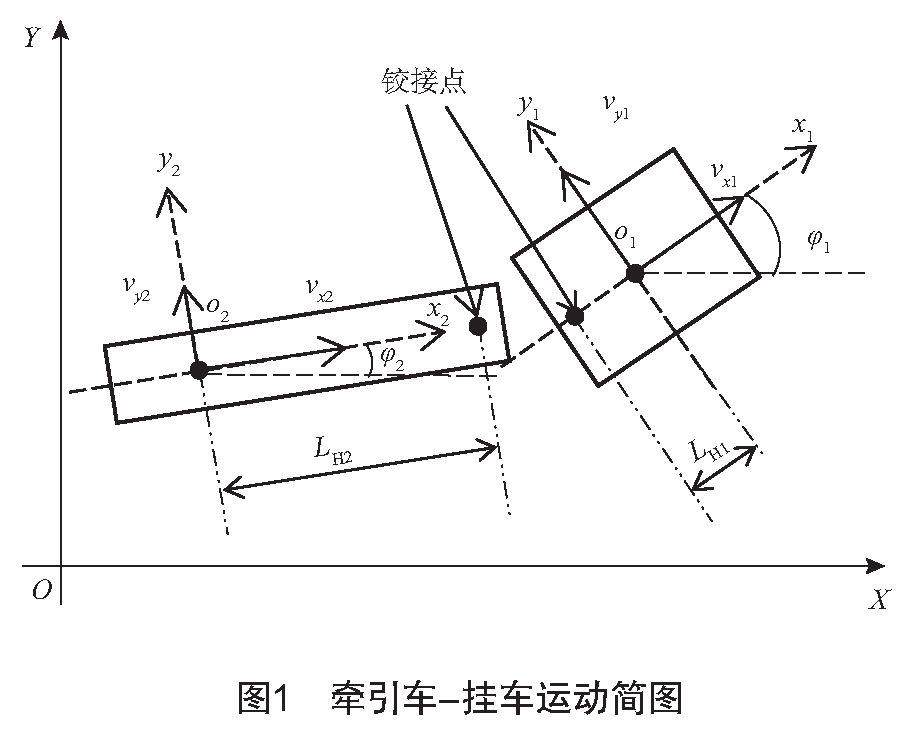
智能驾驶与智慧交通 | 港口自动驾驶集卡动力学模型构建研究
智能驾驶与智慧交通 | 港口自动驾驶集卡动力学模型构建研究









 登录
登录